Tutorial: Optimization#
Part 1: Convex and Linear Optimization#
Optimization Basics, Convexity and Classification#
Exercise 1: Optimization Problem Statement#
Formally state an optimization problem for a space engineering scenario: Minimize fuel consumption (\(f(\mathbf{x}) = \mathbf{c}^\top \mathbf{x}\)) for a satellite maneuver, subject to thrust limits (\(\mathbf{A} \mathbf{x} \leq \mathbf{b}\)) and energy balance (\(\mathbf{h}(\mathbf{x}) = 0\)). Identify degrees of freedom and classify as LP or NLP. Discuss both model development and complexity with your colleagues.
HINT: You don’t have to write out the full model in order to compute the DoF for the physics inside the energy balances and thurst relations, but it might be worth your time to look at those models from the chapters on simulation.
Exercise 2: Convexity (shapes)#
Classify the following shapes as convex or non-convex:

HINT: Remember the formal definition of convexity: if you pick any points \(a, b \in \mathcal{X}\) and draw a line between them then it should not intersect with the boundary of the shape. In this case the domain \(\mathcal{X}\) is the interior of the shape.
Exercise 3: Convexity (functions)#
Prove that the function \(f(x) = x^2\) is convex using the definition. For the nonconvex \(f(x) = x^4 - 3x^2\), find points where the line segment intersects the curve.
The code below modifies the chapter’s ipywidgets code to test new functions, e.g., \(f(x) = e^x\) (convex) vs. \(f(x) = \sin(x)\) (nonconvex). Propose two new functions -one convex and one non-convex- then test
import numpy as np
def test_integrated_moment_sphere(R=1.0, num_sectors=6):
# Total dual area of the vertex
total_dual_area = 0.1
area_per_sector = total_dual_area / num_sectors
# Vertex at the North Pole
v_i = np.array([0, 0, R])
minkowski_area = 0.0
for _ in range(num_sectors):
# 1. Exact Integrated Curvature Normal for this sector
# On a sphere, H = 1/R, and for a small patch, n is approx v_i/R
# K_if = Integrate[ H * n ] dA
K_if = (v_i / R**2) * area_per_sector
# 2. Sector Barycenter
# Even if the curvature is 'exact', the position x in -<x, Hn>
# must be the centroid of where that curvature is distributed.
# For a small sector, the offset from the vertex is O(h)
offset = np.array([np.random.uniform(-0.01, 0.01),
np.random.uniform(-0.01, 0.01), 0])
c_if = v_i + offset
# 3. The Moment Sum
minkowski_area -= np.dot(c_if, K_if)
print(f"Calculated Area: {minkowski_area:.16f}")
print(f"Expected Area: {total_dual_area:.16f}")
print(f"Error: {abs(minkowski_area - total_dual_area):.2e}")
test_integrated_moment_sphere()
Calculated Area: -0.1000000000000000
Expected Area: 0.1000000000000000
Error: 2.00e-01
Exercise 4: Problem classification and standard form#
Classify the following three problems, then write them in standard form (in other words, write in a form that should be accepted by a solver, but do not solve in code):
Minimize the objective function \(x_1 + 2 x_2\) subject to the constraint \(4 x_1 + 6 x_2 \le 10\) and bounded from below (\(x_1, x_2 \ge 0\)).
Maximize the objective \( - 3^3 x_1 - x_2\) subject to the set of constraints \(\mathbf{g(x)} = \left\{ x_1 + x_2 \le 1, x_1 \le 1, -x_2 \le -3 \right\}\).
Minmize the objective function \(f(\mathbf{x}) = 2 x_1^2 + x_1 x_2 + 2 x_2^2 \) with boundaries \(x_1 \in \left[-1.5, 1.5 \right]\) and \(x_2 \in \left[-2, 2 \right]\).
x
---------------------------------------------------------------------------
NameError Traceback (most recent call last)
Cell In[2], line 1
----> 1 x
NameError: name 'x' is not defined
Linear programming (LP)#
Excercise 5: Linear Programming with Simplex, IPM, and HiGHS#
In this excercise we will implement and compare LP solvers on a higher-dimensional problem, emphasizing computational efficiency.
Problem Setup: Consider a higher-dimensional LP inspired by space mission resource allocation: Maximize weighted payload value for a spacecraft fleet subject to constraints on fuel, crew hours, volume, and total mass. The derived model is:
Here, \(x_1, x_2, x_3, x_4\) represent masses allocated to four modules with different values (e.g., scientific instruments prioritized higher). This is a 4-variable, 4-constraint LP (higher-dimensional than the 2D example).
Practice converting this to standard form by hand, before coding. You can validate your solution by computing \(\mathbf{c}^\top \mathbf{x}\) and comparing with the benchmark solutions below (i.e. you should get that \(\mathbf{c}^\top \mathbf{x} = 23.00\) for your solution \(\mathbf{x}\).
Implement the objective and constraints in code. Solve using scipy.optimize.linprog with:
‘revised simplex’,
‘interior-point’,
‘highs’.
Benchmark each solver using timeit or similar and compare runtimes (run multiple iterations for accuracy). Plot or print optima and discuss differences (if any).
Discuss the comparison of solver times, due to differences in your machine build and back-end libraries you might get different results, discuss if the result below are in line with our expectations from the lectures:
Method: revised simplex:
- Optimal value: 23.00,
- x: [3. 2. 0. 0.],
- Time: 0.002612 s
Method: interior-point
- Optimal value: 23.00
- x: [3.00000000e+00 2.00000000e+00 2.34280548e-11 4.72679422e-12]
- Time: 0.002060 s
Method: highs
- Optimal value: 23.00,
- x: [3. 2. 0. 0.]
- Time: 0.001106 s
A visual comparison of the benchmark times for the three solvers can be found in the bar graph below:

Quadratic programming#
(Optional) Exercise 6: Quadratic Programming and Least-Squares#
In this exercise we will implement a basic QP problem
Problem Formulation: Consider a basic QP problem for portfolio optimization: Minimize the risk (quadratic variance) of a two-asset portfolio while achieving a target return, subject to budget constraints. Formally:$\(\begin{align*} \min \quad & x_1^2 + 0.5 x_1 x_2 + x_2^2 - 2x_1 - 3x_2 \\ \text{subject to} \quad & x_1 + x_2 = 1, \\ & x_1, x_2 \geq 0. \end{align*}\)$
Here, \(x_1, x_2\) are investment fractions in two assets.
Rewrite this in standard QP matrix form (identify \(\mathbf{Q}\), \(\mathbf{c}\), equality constraints) by hand. Discuss why it’s convex (check Hessian).
Implement the objective and constraints in Python. Solve using scipy.optimize.minimize with ‘SLSQP’ (Sequential Least Squares Programming, suitable for constrained QP). Print the optimum and verify against unconstrained solution.
HINT: For validation your solution should be \(f^* = -2.04\) at \( x_1 = 0.17\) and \(x_2 = 0.83\). You can additionally validate the solution by plotting slices of the objective funciton in the \(x_1\) and/or \(x_2\) planes.
Linear least squares#
Exercise 7: Linear Least-Squares (40 minutes)#
In this excercise we will solve an overdetermined system via least-squares and visualize noisy data fitting. First we geenerate synthetic noisy data for a quadratic regression model, then we will fit parameters to polynomial \(y = a x^2 + b x + c\) from 20 noisy measurements over \(x \in [0, 10]\). The code snippet below does for an underlying model \(y = 0.1 x^2 + 2 x + 1\) with Gaussian noise added using np.random.normal (you can confirm visualy what this noise looks like using e.g. plt.hist)
Discuss how this connects overdetermined equations (\(m=20 > n=3\)) to optimization (\(\min \| \mathbf{A} \mathbf{x} - \mathbf{y} \|_2^2\)).
Python Implementation: Create the design matrix \(\mathbf{A}\) (columns: \(x^2, x, 1\)), add Gaussian noise to true \(y = 0.1 x^2 + 2 x + 1\), solve with np.linalg.lstsq, and plot data vs. fit. Compute residuals and discuss fit quality.
Adjust the noise levels and resolve the problem, comment on the difference between the solutions to the underlying coefficients.
import numpy as np
import matplotlib.pyplot as plt
# Generate noisy data
x = np.linspace(0, 10, 20)
true_y = 0.1 * x**2 + 2 * x + 1
noise = np.random.normal(0, 1, len(x)) # Gaussian noise
y = true_y + noise
y
Convex optimization#
(Optional) Exercise 8: Local convexity and penalty constraints#
The code below is taken from the lecture notes problem to minimize \(f(x) = x^2 + \sin(2\pi x)\). It should be noted that of course this function is not globally convex, however, there are local basins of attraction where the problem is locally convex.
Define the subdomains \([x_l, x_u] \in [-1.5, 2] \in \mathcal{X}\) where the objective function \(f\) is locally convex (either rigorously or just select the domains by hand).
import numpy as np
import matplotlib.pyplot as plt
from ipywidgets import interact, FloatSlider
# Define f and grad_f (missing in your snippet!)
def f(x):
return x**2 + np.sin(2 * np.pi * x)
def grad_f(x):
return 2*x + 2*np.pi*np.cos(2*np.pi*x)
def gd_demo(alpha=0.01, x_start=1.5):
x = x_start
history = [x]
for _ in range(100):
x -= alpha * grad_f(x)
history.append(x)
x = np.linspace(-2, 2, 1000)
plt.figure(figsize=(8, 5)) # Added for clarity
plt.plot(x, f(x), label='$f(x)$')
plt.plot(history, f(np.array(history)), 'ro-', label='GD Path')
plt.xlabel('x')
plt.ylabel('f(x)')
plt.title(f'GD with α={alpha}, start={x_start}')
plt.legend()
plt.grid(True)
plt.show()
interact(gd_demo, alpha=FloatSlider(min=0.001, max=0.1, step=0.001, value=0.01),
x_start=FloatSlider(min=-2, max=2, step=0.1, value=1.5));
Penalty Functions#
We already saw with the IPM method how penalty barrier methods can be used to constrain and/or guide the optimization routine towards a desired solution. Such penalty barrier methods are useful constructions that allow us to improve our optimizations. For example, suppose that in the above function only care about finding the global minimum around \(x^* \approx -0.25\). In order to reliably find the value of the objective \(f^* = f(x^*)\) (for any starting value \(x_0\) and/or \(\alpha\) value) we can implement penalty barriers in a locally convex domain \(x \in [x_l, x_u]\) as follows:
where
\(g(c_i(\mathbf x))=\max(0,c_i(\mathbf x ))^2\)
In the above equations, \(g(c_i(\mathbf x))\) is the penalty function while \(p\) is called a penalty coefficient. The coefficients must be tuned so that they are aggressive” enough to ensure convexity without making the final problem too ill-conditioned to solve. These kind of methods have the advantage that faster unconstrained GD methods can be used to solve the problem while the disadvantage is the possibility of breaking the solver by making the constraints too aggressive.
As an example of what these functions look like in 1D see the simplified functions plotted below:
import numpy as np
import matplotlib.pyplot as plt # Optional for visualization
# Define our global X domain
xspan = np.linspace(-2, 2, 100)
# Define our local domain we want to focus on:
x_u = 0.5
x_l = -0.5
# Define parameters for our penalty functions
p_1 = 1
p_2 = 1
# Define the penalty functions:
def g_1(x):
return p_1 * np.maximum(0, xspan - x_u)**2
def g_2(x):
return p_2 * np.maximum(0, -(xspan - x_l))**2
# Plot to visualize
plt.plot(xspan, g_1(xspan), label=f'Upper bound $x_u ={x_u}$, $g_i = max(0, x - x_u)^2$')
plt.plot(xspan, g_2(xspan), label=f'Lower bound $x_l ={x_l}$, $g_i = max(0, x - x_u)^2$')
plt.xlabel('x')
plt.ylabel('Result')
plt.title('Vectorized Computation')
plt.legend()
plt.grid(True)
plt.show()
Note that the function is above is zero for our region of interest \(x \in [x_l, x_u]\) so that the final solution is unaffected by the barriers. Feel free to play with the the parameters \(p_1\), \(p_2\) to get a feeling for how much this affects the gradient of the barriers.
Now implement your own custom penalty functions as constraints so that you can redefine the objective function and obtain a new function that is globally convex. Use the the \(x_l, x_u\) pair that you found in the first part of the question to define your barrier penalties.
|
(Optional) Exercise 9: Gradient-Descent Exploration#
Experiment with GD on multimodal functions.
Use the definition Lipschitz continuity and explain why it affects step size in GD.
Identify local vs. global minima in the 2D example from the lecture notes (you can also use the code below) within the domain \([0, 1] \times [0, 1] \in\mathcal{X} \) by using different starting values and then printing the solution given by the optimizer.
In the code below we added momentum (modify update to \(\mathbf{v}_{k+1} = \beta \mathbf{v}_k - \alpha \nabla f\), \(\mathbf{x}_{k+1} = \mathbf{x}_k + \mathbf{v}_{k+1}\) (\(\beta=0.9\))) to the python multimodal demonstrations from the lecture notes. Try different starts (\(\alpha = 0.01\)) and note basins. Try to add your own objective function with shallower basins of attraction.
import numpy as np
import matplotlib.pyplot as plt
from ipywidgets import interact, FloatSlider
# Extend chapter's gd_demo or multimodal widget
def gd_with_momentum(start_x1, start_x2, alpha=0.01, beta=0.9, max_iters=100):
x = np.array([start_x1, start_x2])
v = np.zeros(2)
path = [x.copy()]
for _ in range(max_iters):
grad = grad_f(*x) # From chapter
v = beta * v - alpha * grad
x += v
path.append(x.copy())
return np.array(path)
min_x = 0
min_y = 0
# Define the multimodal function and gradient
def f(x1, x2):
return np.sin(3 * np.pi * x1) + np.sin(3 * np.pi * x2) + 0.1 * (x1**2 + x2**2)
def grad_f(x1, x2):
df_dx1 = 3 * np.pi * np.cos(3 * np.pi * x1) + 0.2 * x1
df_dx2 = 3 * np.pi * np.cos(3 * np.pi * x2) + 0.2 * x2
return np.array([df_dx1, df_dx2])
# GD function
def run_gd(start_x1, start_x2, alpha, max_iters=100):
x = np.array([start_x1, start_x2])
path = [x.copy()]
for _ in range(max_iters):
grad = grad_f(*x)
x -= alpha * grad
path.append(x.copy())
if np.linalg.norm(grad) < 1e-4:
break
return np.array(path)
# Interactive plot
def plot_gd(start_x1=0.5, start_x2=0.5, alpha=0.01):
#path = run_gd(start_x1, start_x2, alpha)
path = gd_with_momentum(start_x1, start_x2, alpha)
# Contour plot
x1 = np.linspace(min_x, 1.5, 200)
x2 = np.linspace(min_y, 1.5, 200)
X1, X2 = np.meshgrid(x1, x2)
Z = f(X1, X2)
plt.figure(figsize=(8, 6))
plt.contour(X1, X2, Z, levels=20, cmap='viridis', alpha=0.7)
plt.colorbar(label='f(x1, x2)')
plt.plot(path[:, 0], path[:, 1], 'r-', marker='o', markersize=3, label='GD Path')
plt.scatter(path[0, 0], path[0, 1], color='green', s=100, label='Start')
plt.scatter(path[-1, 0], path[-1, 1], color='black', s=100, label='End')
plt.xlabel('$x_1$')
plt.ylabel('$x_2$')
plt.title('Gradient Descent on Multimodal Function')
plt.legend()
plt.grid(True)
plt.show()
interact(plot_gd,
start_x1=FloatSlider(min=min_x, max=1.5, step=0.05, value=0.7, description='Start x1:'),
start_x2=FloatSlider(min=min_y, max=1.5, step=0.05, value=0.6, description='Start x2:'),
alpha=FloatSlider(min=0.001, max=0.05, step=0.001, value=0.01, description='Alpha:'));
# Integrate into plot_gd function
Discussion: How do starting points affect convergence in nonconvex space trajectory optimization?
Part 2: Nonlinear Programming (NLP)#
Excercise 1: KKT Conditions Verification#
Verify KKT conditions symbolically and graphically for a simple constrained NLP. Consider the NLP: Minimize \(f(x, y) = (x - 1)^2 + (y - 1)^2\) subject to \(g(x, y) = x^2 + y^2 - 0.5 \leq 0\).
Use SymPy to compute the KKT system (primal/dual feasibility, stationarity, complementarity). Solve for the KKT point and multipliers.
Modify the Matplotlib code from the chapter to plot the objective contours, feasible region, and gradients at the KKT point. Verify stationarity visually.
Discuss why this satisfies the conditions and its relevance (e.g., optimizing satellite sensor placement under power constraints).
import numpy as np
import matplotlib.pyplot as plt
from scipy.optimize import minimize, least_squares
import sympy as sp
# Part a: SymPy
x, y, lam = sp.symbols('x y lambda')
f = (x - 1)**2 + (y - 1)**2
g = x**2 + y**2 - 0.5
# ... (complete as in chapter)
# Part b: Plot (adapt chapter code)
Exercise 2: Trust-Region Methods on Rosenbrock#
Implement and analyze a basic trust-region algorithm. Use the Rosenbrock function \(f(x, y) = 100(y - x^2)^2 + (1 - x)^2\).
Modify the chapter’s NumPy trust-region code to track trust radius \(\delta_k\) over iterations. Run from initial point \((-1.2, 1)\).
Plot the iteration path on contours and the radius evolution. Experiment with different \(\eta_0, \eta_1\) (e.g., tighter thresholds) and discuss convergence (e.g., how it handles the “banana” valley, analogous to non-linear trajectory optimization).
# Adapt chapter's rosenbrock and trust_region_opt functions
# Add delta tracking: deltas = [delta0]
# In loop: deltas.append(delta_k)
# Plot: plt.plot(deltas)
Exercise 3: SQP for Constrained Optimization#
Apply SQP to an engineering-inspired problem. Model a simplified thrust allocation: Minimize \(f(\mathbf{u}) = \mathbf{u}^\top \mathbf{u}\) (energy) for thrusts \(\mathbf{u} = [u_1, u_2]\), subject to \(\mathbf{A} \mathbf{u} = \mathbf{\tau}\) (force balance, equality) and \(u_1^2 + u_2^2 \leq 1\) (non-linear limit), with \(\mathbf{A} = [[1,1],[1,-1]]\), \(\mathbf{\tau} = [1, 0.5]\), bounds \(|u_i| \leq 0.8\).
Use scipy.optimize.minimize(method=’SLSQP’) to solve. Provide Jacobians if possible for efficiency.
Plot the feasible region, constraints, and solution. Discuss active constraints and KKT relevance (e.g., in spacecraft attitude control).
Stub Code:
# Adapt chapter's objective, constraints
res = minimize(objective, u0, method='SLSQP', bounds=bounds, constraints=constraints)
# Plot: Use plt.fill for circle constraint, lines for equalities
(Optional) Exercise 3b: Solving NLPs with scipy.optimize.minimize#
Extra practice with NLPs using SciPy. Implement and solve NLPs using SciPy, covering bounds, inequality/equality constraints, and parameter tuning. This explores full solver inputs on a toy problem mimicking resource allocation (e.g., optimizing spacecraft power distribution).
Define an NLP: Minimize \(f(x) = (x_1 - 1)^2 + \sin^2(x_2)\) subject to equality \(x_1 + x_2 = 1\), inequality \(x_1^2 + x_2^2 \leq 5\), and bounds \(x_1, x_2 \geq 0\). Use minimize(method=’SLSQP’) to solve from initial point \(\mathbf{x} = [0.5, 0.5]\).
Modify key parameters: Change method to ‘trust-constr’, add Jacobians (compute symbolically with SymPy if needed), experiment with tolerance (tol=1e-8), and max iterations (maxiter=200). Plot the solution on contours and discuss changes (e.g., convergence speed).
Discuss how constraints affect the minimum vs. unconstrained case.
Starter code (contains solution to 1):
Exercise 4: Non-Linear Least-Squares Fitting#
In this exercise we fit a non-linear model to noisy data. Simulate orbital decay data: \(r(t) = r_0 e^{-\beta t} + \epsilon\), with noisy measurements (e.g., satellite altitude over time).
Generate synthetic data (\(r_0=1000, \beta=0.01\)) and use scipy.optimize.least_squares to fit parameters.
Plot data, true model, and fit. Add bounds (e.g., \(\beta > 0\)) and discuss Jacobian usage. Relate to estimating drag coefficients from telemetry.
Compare to linear least-squares from Chapter 7.
import numpy as np
import matplotlib.pyplot as plt
from scipy.optimize import least_squares
# Data generation: Simulate orbital decay data r(t) = r0 * exp(-beta * t) + epsilon
# True parameters: r0 = 1000 km (initial altitude), beta = 0.01 (decay rate)
np.random.seed(42) # For reproducibility
t = np.linspace(0, 100, 50) # Time points (e.g., days)
r0_true = 1000
beta_true = 0.01
epsilon = 5 * np.random.randn(len(t)) # Noise (e.g., measurement error in km)
r_noisy = r0_true * np.exp(-beta_true * t) + epsilon
# Residual function for NLLS
def residuals(params, t, r):
r0, beta = params
return #TODO: complete this line
# Initial guess
params0 = [900, 0.005]
# Solve NLLS with bounds (r0 > 0, beta > 0)
bounds = ([0, 0], [np.inf, np.inf])
res = least_squares(residuals, params0, args=(t, r_noisy), bounds=bounds, method='trf') # Trust-region reflective
print("Fitted parameters [r0, beta]:", res.x)
print("Residual sum of squares:", res.cost)
# Plot
r_fit = res.x[0] * np.exp(-res.x[1] * t)
plt.scatter(t, r_noisy, label='Noisy data')
plt.plot(t, r0_true * np.exp(-beta_true * t), 'k--', label='True model')
plt.plot(t, r_fit, 'r-', label='Fitted model')
plt.xlabel('Time t (days)')
plt.ylabel('Altitude r (km)')
plt.title('NLLS Fit: Orbital Decay')
plt.legend()
plt.grid(True)
plt.show()
Exercise 5: SGD with Momentum on Noisy 1D Function#
Compare SGD (with/without momentum) to a deterministic solver on a noisy loss landscape mimicking NN training. Define a 1D noisy function \(f(x) = (x-2)^2 + 0.5 \sin(10x) + \epsilon\) (big valley with local minima, noise \(\epsilon \sim \mathcal{N}(0,0.1)\)).
[Practice only; solution below] Implement SGD with optional momentum. Use ipywidgets for sliders: learning rate (0.01–0.1), momentum \(\beta\) (0–0.99), epochs (100–1000). Plot path and evaluations.
Compare to minimize (e.g., ‘BFGS’ for deterministic). Count evaluations (via callback) and discuss how momentum speeds convergence by escaping local minima.
import numpy as np
import matplotlib.pyplot as plt
from ipywidgets import interact, FloatSlider, IntSlider
from scipy.optimize import minimize
# Noisy function and gradient
def noisy_func(x, sigma=0.1):
return (x - 2)**2 + 0.5 * np.sin(10 * x) + sigma * np.random.randn()
def grad_noisy(x, sigma=0.1):
return 2*(x - 2) + 5 * np.cos(10 * x) + sigma * np.random.randn()
# SGD with momentum
def sgd_1d(x0, lr=0.01, beta=0.0, epochs=100, sigma=0.1, tol=1e-3):
x = x0
v = 0
path = [x]
evals = 0
x_prev = np.inf
for _ in range(epochs):
g = grad_noisy(x, sigma)
v = beta * v + (1 - beta) * g
x -= lr * v
path.append(x)
evals += 1 # Each grad call is an eval
#print(f'abs(x - x_prev) = {abs(x - x_prev) }')
if abs(x - x_prev) < tol:
break
else:
x_prev = x
return np.array(path), evals
# Deterministic function (noise-free)
def det_func(x):
return (x - 2)**2 + 0.5 * np.sin(10 * x)
def det_grad(x):
return 2*(x - 2) + 5 * np.cos(10 * x)
# Deterministic solver (BFGS, without or without noise) with path
def det_solver(x0, noisy=True, jac=True):
path = [np.array([x0])]
eval_count = 0
def callback(xk):
path.append(xk.copy())
nonlocal eval_count
eval_count += 1
if noisy:
if jac:
jac_func = grad_noisy
else:
jac_func = None
res = minimize(noisy_func, np.array([x0]), jac=grad_noisy, method='BFGS', callback=callback)
else:
res = minimize(det_func, np.array([x0]), jac=det_grad, method='BFGS', callback=callback)
print(f'BFGS results: {res}')
eval_count = res.nfev
return res.x[0], np.array(path)[:, 0], eval_count
# Interactive plot with subplots
def interactive_sgd(x0=-1.0, lr=0.05, beta=0.9, max_epochs=500, sigma=0.1):
path_sgd, evals_sgd = sgd_1d(x0, lr, beta, max_epochs, sigma)
x_opt_det, path_det, evals_det = det_solver(x0)
x_vals = np.linspace(-1, 4, 200)
y_vals = det_func(x_vals) # Noise-free for plot
y_noisy_overlay = det_func(x_vals) + sigma * np.random.randn(len(x_vals)) # Noisy overlay, no fixed seed
fig, axs = plt.subplots(1, 2, figsize=(12, 5))
# SGD subplot
axs[0].plot(x_vals, y_noisy_overlay, color='gray', alpha=0.7, label='Noisy overlay')
axs[0].plot(x_vals, y_vals, 'k-', alpha=0.3, label='Noise-free f(x)')
axs[0].plot(path_sgd, noisy_func(path_sgd, sigma=0), 'tab:red', marker='o', label='SGD Path', markersize=4)
axs[0].plot(path_sgd[-1], noisy_func(path_sgd[-1], sigma=0), 'x', color='tab:red',label=f'Final SGD: $f({path_sgd[-1]:.2f}) = {det_func(path_sgd[-1]):.2f}$ ', markersize=10)
axs[0].set_title(f'SGD ({evals_sgd} evals)')
axs[0].set_xlabel('x')
axs[0].set_ylabel('f(x)')
axs[0].legend()
axs[0].grid(True)
# BFGS subplot
axs[1].plot(x_vals, y_noisy_overlay, color='gray', alpha=0.7, label='Noisy overlay')
axs[1].plot(x_vals, y_vals, 'k-', alpha=0.3, label='Noise-free f(x)')
axs[1].plot(path_det, det_func(path_det), 'tab:blue', marker='o', label='BFGS Path', markersize=4)
axs[1].plot(x_opt_det, det_func(x_opt_det), 'x', color='tab:blue',label=f'Final BFGS: $f({x_opt_det:.2f}) = {det_func(x_opt_det):.2f}$ ', markersize=10)
axs[1].set_title(f'BFGS ({evals_det} evals)')
axs[1].set_xlabel('x')
axs[1].legend()
axs[1].grid(True)
plt.suptitle('SGD vs. BFGS on Noisy/Non-Linear Function')
plt.show()
interact(interactive_sgd, x0=FloatSlider(min=-2.0, max=2.0, step=0.1, value=-1.0),
lr=FloatSlider(min=0.01, max=0.1, step=0.01, value=0.05),
beta=FloatSlider(min=0.0, max=0.99, step=0.05, value=0.9),
max_epochs=IntSlider(min=100, max=1000, step=100, value=500),
sigma=FloatSlider(min=0.0, max=0.5, step=0.05, value=0.1))
(Optional) Exercise 5: Integrating Backprop and SGD in NNs#
In this exercise train a NN with SGD and momentum on a dataset. Use the non-linear function fitting from Section 8.7.4.
Modify the NumPy backprop code to use mini-batch SGD with momentum (\(\beta=0.9\)). Split data into batches of 32.
Plot loss curves with/without momentum. Integrate scikit-learn’s MLPRegressor (with ‘sgd’ solver) for comparison.
Discuss why momentum helps (e.g., in training NNs for control policies).
# Adapt forward/backprop from chapter
# For SGD: Randomly sample batches in loop
# Add velocity v = [np.zeros_like(p) for p in theta]
# Update: v[i] = beta * v[i] + (1 - beta) * grads[i]; theta[i] -= lr * v[i]
# scikit-learn: from sklearn.neural_network import MLPRegressor
mlp = MLPRegressor(hidden_layer_sizes=(10,5), solver='sgd', momentum=0.9)
mlp.fit(x, y.ravel())
def test_sphere_precision(R=1.0, num_vertices=100):
# Mock data for a sphere
# Area = 4 * pi * R^2
true_area = 4 * np.pi * (R**2)
# Simulate discrete dual areas that sum to total area
individual_area = true_area / num_vertices
minkowski_total = 0.0
for i in range(num_vertices):
# Generate random point on sphere
phi = np.random.uniform(0, 2*np.pi)
cos_theta = np.random.uniform(-1, 1)
theta = np.arccos(cos_theta)
pos = R * np.array([
np.sin(theta) * np.cos(phi),
np.sin(theta) * np.sin(phi),
np.cos(theta)
])
# In a sphere, H = 1/R, n = pos/R.
# Integrated Hn over dual area Ai is (1/R * pos/R) * Ai
hn_integrated = (pos / R**2) * individual_area
# Minkowski term: - <pos, hn_integrated>
# Note: For a closed sphere, boundary_sum is 0
minkowski_total -= np.dot(pos, hn_integrated)
error = abs(minkowski_total + true_area)
print(f"Calculated Area: {minkowski_total:.15f}")
print(f"True Sphere Area: {true_area:.15f}")
print(f"Relative Error: {error / true_area:.2e}")
test_sphere_precision()
import numpy as np
def compute_corrected_minkowski(vertices, boundary_indices):
"""
vertices: list of objects with .pos, .hn (integrated vector), and .nn
"""
total_area = 0.0
# 1. Base Minkowski Sum (0-th order)
for i, v in enumerate(vertices):
total_area -= np.dot(v.pos, v.hn)
# 2. Curvature Gradient Correction (2nd order)
# This accounts for the non-constancy of Hn across the dual area
for i, v in enumerate(vertices):
if i in boundary_indices:
continue
correction = 0.0
# Calculate local gradient of Hn by comparing with neighbors
for j_idx in v.nn:
v_j = vertices[j_idx]
edge = v_j.pos - v.pos
L_sq = np.dot(edge, edge)
# The difference in integrated Hn per unit area
# (Approximating the local derivative of the curvature field)
# We assume dual areas Ai and Aj are available
grad_hn = (v_j.hn / v_j.dual_area) - (v.hn / v.dual_area)
# This term captures the 'swing' of the normal relative to the vertex
correction += (1.0/12.0) * L_sq * np.dot(edge, grad_hn)
total_area += correction
# 3. Add boundary flux term (as derived previously)
# ... (boundary_sum code from previous turn)
return total_area
Part 3: Global Optimization (GO) and Mixed-variable Problems#
Setup Code:
import numpy as np
import matplotlib.pyplot as plt
from scipy.optimize import shgo, least_squares, direct
from scipy.optimize import Bounds
import sympy as sp # For symbolic Jacobians if needed
Exercise 1: Finding All Roots of a Non-Linear System Using Gauss-Newton and SHGO#
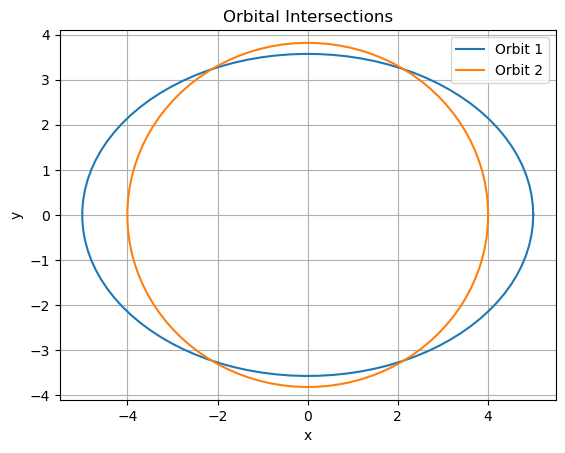
Solve a system of non-linear equations by reformulating as NLLS (sum of squared residuals, solvable via Gauss-Newton), then use SHGO globally to find all roots. Apply to a 2D space engineering problem: Keplerian orbit intersection (find points where two elliptical orbits cross, e.g., for rendezvous planning). The system: Solve \(r = a (1 - e^2) / (1 + e \cos \theta)\) for two orbits intersecting (parameterized by semi-major axis \(a\), eccentricity \(e\)):
Orbit 1:
(elliptical, \(b_1 = a_1 \sqrt{1 - e_1^2}\))
Orbit 2: Similar for \(a_2, e_2\).
The parameters \(a_1, a_2, e_1\) and \(e_2\) are defined in the code below.
Find intersections by solving the system
where
1.a. NLLS Formulation and Solving#
Use least_squares (Gauss-Newton) to find one root from initial guess [1,1]. Then use SHGO on the NLLS objective \(\sum f_i^2\) with bounds (e.g., [-5,5] for x_1,x_2) to find all global minima (roots where obj=0).
1.b. Plotting solutions#
Plot the ellipses and all found roots. Discuss multiplicity (up to 4 intersections) and why global opt is needed (local methods miss roots). Expected Outcome: Roots at intersections; SHGO finds all zeros. Relate to satellite collision avoidance.
# Parameters: Orbit 1 (a1=3, e1=0.5), Orbit 2 (a2=4, e2=0.3)
a1, e1 = 5, 0.7
b1 = a1 * np.sqrt(1 - e1**2)
a2, e2 = 4, 0.3
b2 = a2 * np.sqrt(1 - e2**2)
roots = []
# System residuals
def residuals(x):
x, y = z
f1 = None # = 0
f2 = None # = 0
return
# NLLS objective for SHGO (sum squares)
def nlls_obj(z):
pass
#res = #
return # np.sum(np.array(res)**2)
# Local solve with Gauss-Newton, e.g/
#z0 = np.array([1.0, 1.0])
#res_local = least_squares(residuals, z0, method='lm')
#print("Local root:", res_local.x, "Obj:", nlls_obj(res_local.x))
# Global solve with SHGO, suggested to use n=100, iters=5
# bounds = [(-5, 5), (-5, 5)]
# res_global = shgo(nlls_obj, b...) # Sample densely
# roots = res_global.xl[res_global.funl < 1e-10] # Filter true zeros
# print("All roots:", roots)
# Plot ellipses and roots
theta = np.linspace(0, 2*np.pi, 100)
plt.plot(a1 * np.cos(theta), b1 * np.sin(theta), '-', label='Orbit 1')
plt.plot(a2 * np.cos(theta), b2 * np.sin(theta), '-', label='Orbit 2')
if len(roots) > 0:
plt.plot(roots[:,0], roots[:,1], 'ko', label='Roots')
plt.xlabel('x')
plt.ylabel('y')
plt.title('Orbital Intersections')
plt.axis('equal')
plt.legend()
plt.grid(True)
plt.show()
(Optional) Exercise 2: Manual Refinement in a Simplified 1D DIRECT Algorithm#
In this exercise, you will manually simulate the selection and refinement steps of a simplified 1D DIRECT algorithm for global optimization. The objective function is a “black-box” multimodal 1D function (hidden from you, as in real black-box scenarios like expensive simulations), defined over the interval \([0, 2\pi]\). You are given pre-evaluated function values at specific points, the current set of intervals, and an analytically derived Lipschitz constant \(L = 11\) (computed as the maximum absolute derivative over the domain, \(L = \max |f'(x)| = 10 + 1 = 11\), based on the function’s form without revealing it).
Your task is to:
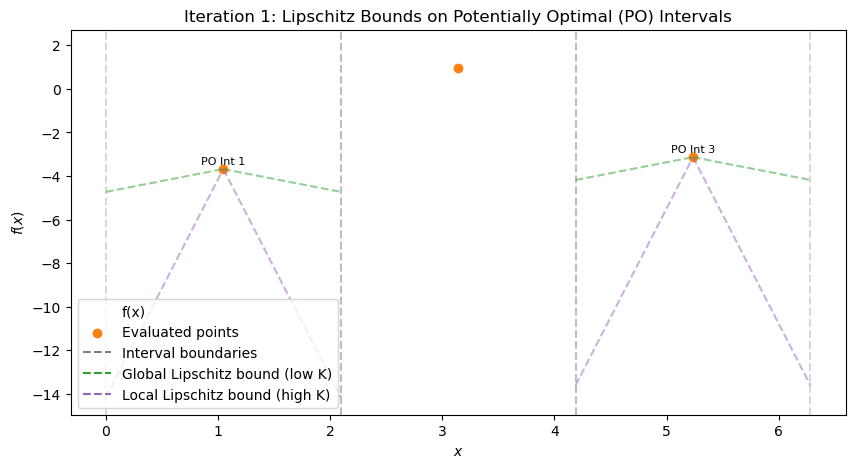
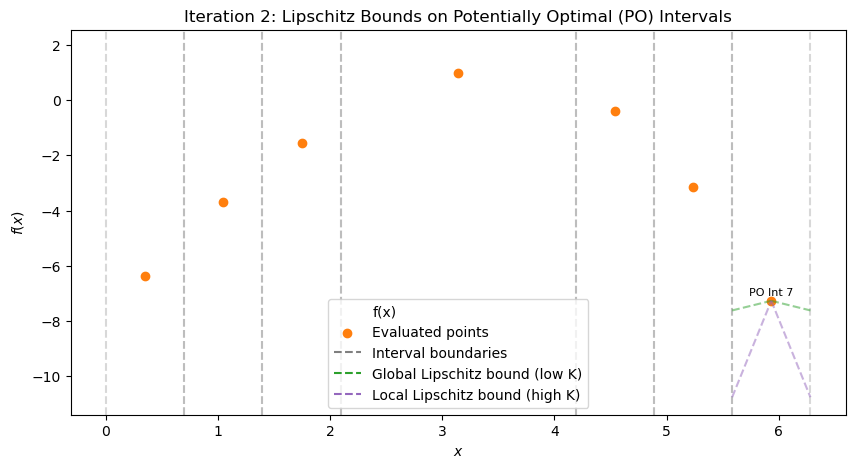
Compute potential lower bounds for each interval using the formula \(f(c_i) - L \cdot (d_i / 2)\), where \(c_i\) is the center, \(f(c_i)\) the value at center, and \(d_i\) the length. Identify “potentially optimal” intervals: those where, for some \(K \leq L\), the lower bound is the best (lowest) among all, suggesting it could contain the global minimum. Geometrically, plot points \((d_i / 2, f(c_i))\) and find the lower-right convex hull—these are potentially optimal for varying \(K\). Decide which intervals to refine next (divide into thirds) and explain why, balancing global exploration (large intervals) and local exploitation (small, promising ones). Use the provided code to visualize the state at each iteration, but perform calculations manually.
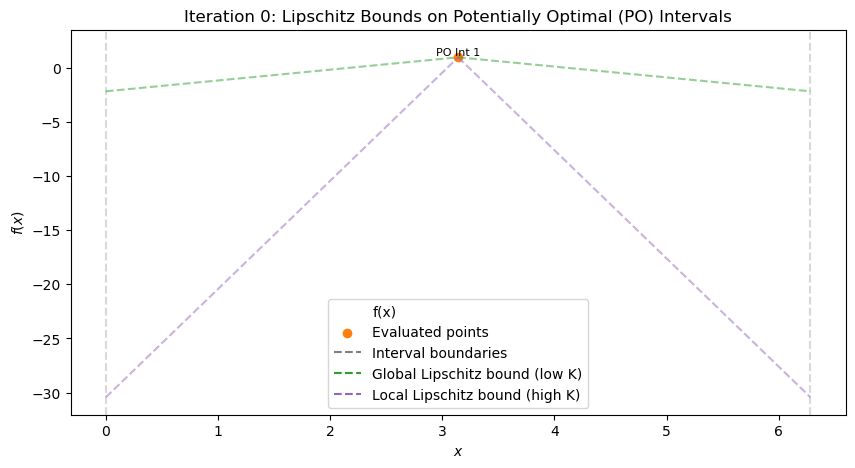
This mimics how DIRECT avoids needing the exact \(L\) by considering a range of \(K\). Setup The black-box function \(f(x)\) has multiple minima. Use the starter code below to simulate and visualize iterations (controlled by a slider for single plots). The objective is commented out (hidden); use only the pre-evaluated \(f(c)\) for manual work. Initial state:
Interval 1: a=0, b≈6.2832, c≈3.1416, d≈6.2832, f(c)≈-2.859 (large initial interval)
Current best \(f_{\text{best}} \approx -2.859\) at x≈3.1416. Lipschitz constant \(L=11\) (provided; in practice, overestimated if unknown). Run the code to see iterations 0–5 (use slider). At each step (after viewing the plot), manually:
List current intervals with a, b, c, d, f(c) (from plot/scatter or print if added). Compute LBs with L=11. Sketch (d/2, f(c)) plot, find hull. Propose 1–2 intervals to refine, justify.
Starter Code for Visualization Use this to run the simulation step-by-step via slider. Do NOT use the hidden objective for calculations—rely on evaluated points shown.
Questions:
At iteration 0 (single interval), compute LB with L=11. Is it potentially optimal? Explain. After viewing iteration 1, list intervals with a, b, c, d, f(c) (from scatter/text). Compute LBs. Which have LB < f_best? Sketch (d/2, f(c)) plot for iteration 1. Identify convex hull points (PO intervals). Propose which interval(s) to refine next for iteration 2. Justify (e.g., large for exploration if LB low). Repeat for iterations 2–4: Compute LBs, hull, decide refinements at each step. (Advanced) If L=5, how do LBs change at iter 1? Which additional intervals become PO?
Submit: Per-step calculations, sketches, refinement choices/rationale. (Bonus: Modify code to print interval details per iter.)
import numpy as np
import matplotlib.pyplot as plt
from ipywidgets import interact, IntSlider
# Define the objective function
def objective(x):
return np.sin(10 * x) - (x - 3)**2 + 1
bounds = [0, 2 * np.pi]
x_plot = np.linspace(bounds[0], bounds[1], 1000)
# f_plot = objective(x_plot) # Hidden; no plot to avoid revealing
# Pre-initialized for exercise (use these f_c for manual)
class Interval:
def __init__(self, a, b, f_c):
self.a = a
self.b = b
self.c = (a + b) / 2
self.d = b - a
self.f_c = f_c
def select_potentially_optimal(intervals, f_best, epsilon=1e-4):
# Sort by decreasing d, then increasing f_c (since minimizing)
sorted_intervals = sorted(intervals, key=lambda i: (-i.d, i.f_c))
po = []
min_f = min([i.f_c for i in intervals])
for inter in sorted_intervals:
f_c = inter.f_c
if f_c - (inter.d / 2) * 1 < f_best - epsilon * abs(f_best):
po.append(inter)
if f_c <= min_f:
po.append(inter)
return list(set(po)) # Dedup
# Simulate steps (pre-run with hardcoded f_l/f_r to hide obj)
states = [] # List of (intervals, all_points, po, f_best) per iter
# Initial
initial_c = (bounds[0] + bounds[1]) / 2
initial_f_c = objective(initial_c)
intervals = [Interval(bounds[0], bounds[1], initial_f_c)] # Computed f(c)
f_best = initial_f_c
all_points = {(initial_c, f_best)}
po = select_potentially_optimal(intervals, f_best)
states.append((intervals[:], set(all_points), po[:], f_best)) # Copy to store
max_iters = 5
for it in range(1, max_iters + 1):
new_intervals = []
# Simulate dividing each PO (using computed f for new centers)
for inter in po:
d_third = inter.d / 3
a_l, b_l = inter.a, inter.a + d_third
c_l = (a_l + b_l) / 2
f_l = objective(c_l) # Computed
new_intervals.append(Interval(a_l, b_l, f_l))
all_points.add((c_l, f_l))
new_intervals.append(Interval(inter.a + d_third, inter.a + 2 * d_third, inter.f_c)) # Center
a_r, b_r = inter.a + 2 * d_third, inter.b
c_r = (a_r + b_r) / 2
f_r = objective(c_r) # Computed
new_intervals.append(Interval(a_r, b_r, f_r))
all_points.add((c_r, f_r))
min_val = min(f_l, f_r, inter.f_c)
if min_val < f_best:
f_best = min_val
# Update x_best (simplified)
intervals = [i for i in intervals if i not in po] + new_intervals
po = select_potentially_optimal(intervals, f_best)
states.append((intervals[:], set(all_points), po[:], f_best))
# Function to plot single iteration via slider
def plot_iteration(it):
intervals, all_points, po, f_best = states[it]
fig, ax = plt.subplots(figsize=(10, 5))
# Function hidden, no plot
for i, inter in enumerate(intervals):
ax.axvline(inter.a, color='tab:gray', linestyle='--', alpha=0.3)
ax.axvline(inter.b, color='tab:gray', linestyle='--', alpha=0.3)
if inter in po:
ax.text(inter.c, inter.f_c + 0.2, f'PO Int {i+1}', fontsize=8, color='black', ha='center')
ax.scatter([p[0] for p in all_points], [p[1] for p in all_points], color='tab:orange', label='Evaluated points')
for inter in po:
k_global = 1
k_local = 10
x_left = inter.c - inter.d / 2
x_right = inter.c + inter.d / 2
ax.plot([x_left, inter.c], [inter.f_c - k_global * (inter.d / 2), inter.f_c], 'tab:green', linestyle='--', alpha=0.5)
ax.plot([inter.c, x_right], [inter.f_c, inter.f_c - k_global * (inter.d / 2)], 'tab:green', linestyle='--', alpha=0.5)
ax.plot([x_left, inter.c], [inter.f_c - k_local * (inter.d / 2), inter.f_c], 'tab:purple', linestyle='--', alpha=0.5)
ax.plot([inter.c, x_right], [inter.f_c, inter.f_c - k_local * (inter.d / 2)], 'tab:purple', linestyle='--', alpha=0.5)
ax.plot([], [], 'tab:gray', linestyle='--', label='Interval boundaries')
ax.plot([], [], 'tab:green', linestyle='--', label='Global Lipschitz bound (low K)')
ax.plot([], [], 'tab:purple', linestyle='--', label='Local Lipschitz bound (high K)')
ax.set_title(f'Iteration {it}: Lipschitz Bounds on Potentially Optimal (PO) Intervals')
ax.set_xlabel('$x$')
ax.set_ylabel('$f(x)$')
ax.set_ylim(-10, 2) # Adjusted based on known range
ax.legend()
plt.show()
interact(plot_iteration, it=IntSlider(min=0, max=max_iters, step=1, value=0));
Full solution objective and refinement logic (for reference; students do manual calc):
import numpy as np
import matplotlib.pyplot as plt
def objective(x):
return np.sin(10 * x) + - (x - 3)**2 + 1 # Hidden black-box function
bounds = [0, 2 * np.pi]
x_plot = np.linspace(bounds[0], bounds[1], 1000)
f_plot = objective(x_plot)
# Simulate DIRECT steps (simplified 1D implementation)
class Interval:
def __init__(self, a, b, f_c):
self.a = a
self.b = b
self.c = (a + b) / 2
self.d = b - a
self.f_c = f_c
def select_potentially_optimal(intervals, f_best, epsilon=1e-4):
points = sorted([(i.d, i.f_c, i) for i in intervals], reverse=True) # Large d first
po = []
min_f = min([i.f_c for i in intervals])
for _, f_c, inter in points:
if f_c - (inter.d / 2) * 1 < f_best - epsilon * abs(f_best):
po.append(inter)
if f_c <= min_f:
po.append(inter)
return list(set(po)) # Dedup
# Initial setup
intervals = [Interval(bounds[0], bounds[1], objective((bounds[0] + bounds[1]) / 2))]
f_best = intervals[0].f_c
x_best = intervals[0].c
all_points = {(intervals[0].c, f_best)}
# Function to plot state (updated for clarity: no alpha on function, label PO intervals)
def plot_iteration(it, intervals, all_points, po):
fig, ax = plt.subplots(figsize=(10, 5))
ax.plot(x_plot, f_plot, 'tab:blue', label='f(x)', alpha=0) # Full opacity
for i, inter in enumerate(intervals):
ax.axvline(inter.a, color='tab:gray', linestyle='--', alpha=0.3)
ax.axvline(inter.b, color='tab:gray', linestyle='--', alpha=0.3)
if inter in po:
ax.text(inter.c, inter.f_c + 0.2, f'PO Int {i+1}', fontsize=8, color='black', ha='center') # Label PO
ax.scatter([p[0] for p in all_points], [p[1] for p in all_points], color='tab:orange', label='Evaluated points')
# Draw example Lipschitz lines for PO intervals
for inter in po:
k_global = 1
k_local = 10
x_left = inter.c - inter.d / 2
x_right = inter.c + inter.d / 2
ax.plot([x_left, inter.c], [inter.f_c - k_global * (inter.d / 2), inter.f_c], 'tab:green', linestyle='--', alpha=0.5)
ax.plot([inter.c, x_right], [inter.f_c, inter.f_c - k_global * (inter.d / 2)], 'tab:green', linestyle='--', alpha=0.5)
ax.plot([x_left, inter.c], [inter.f_c - k_local * (inter.d / 2), inter.f_c], 'tab:purple', linestyle='--', alpha=0.5)
ax.plot([inter.c, x_right], [inter.f_c, inter.f_c - k_local * (inter.d / 2)], 'tab:purple', linestyle='--', alpha=0.5)
ax.plot([], [], 'tab:gray', linestyle='--', label='Interval boundaries')
ax.plot([], [], 'tab:green', linestyle='--', label='Global Lipschitz bound (low K)')
ax.plot([], [], 'tab:purple', linestyle='--', label='Local Lipschitz bound (high K)')
ax.set_title(f'Iteration {it}: Lipschitz Bounds on Potentially Optimal (PO) Intervals')
ax.set_xlabel('$x$')
ax.set_ylabel('$f(x)$')
ax.legend()
plt.show()
# Iteration 0: Initial
po = select_potentially_optimal(intervals, f_best)
plot_iteration(0, intervals, all_points, po)
# Run a few iterations
max_iters = 3
for it in range(1, max_iters + 1):
new_intervals = []
for inter in po:
d_third = inter.d / 3
# Left
a_l, b_l = inter.a, inter.a + d_third
c_l = (a_l + b_l) / 2
f_l = objective(c_l)
new_intervals.append(Interval(a_l, b_l, f_l))
all_points.add((c_l, f_l))
# Center (reuse)
new_intervals.append(Interval(inter.a + d_third, inter.a + 2 * d_third, inter.f_c))
# Right
a_r, b_r = inter.a + 2 * d_third, inter.b
c_r = (a_r + b_r) / 2
f_r = objective(c_r)
new_intervals.append(Interval(a_r, b_r, f_r))
all_points.add((c_r, f_r))
min_val = min(f_l, f_r, inter.f_c)
if min_val < f_best:
f_best = min_val
idx = np.argmin([f_l, f_r, inter.f_c])
x_best = [c_l, c_r, inter.c][idx]
# Update intervals: remove divided, add new
intervals = [i for i in intervals if i not in po] + new_intervals
po = select_potentially_optimal(intervals, f_best)
plot_iteration(it, intervals, all_points, po)
print(f"After {max_iters} iterations, best x ≈ {x_best:.3f}, f ≈ {f_best:.3f}")
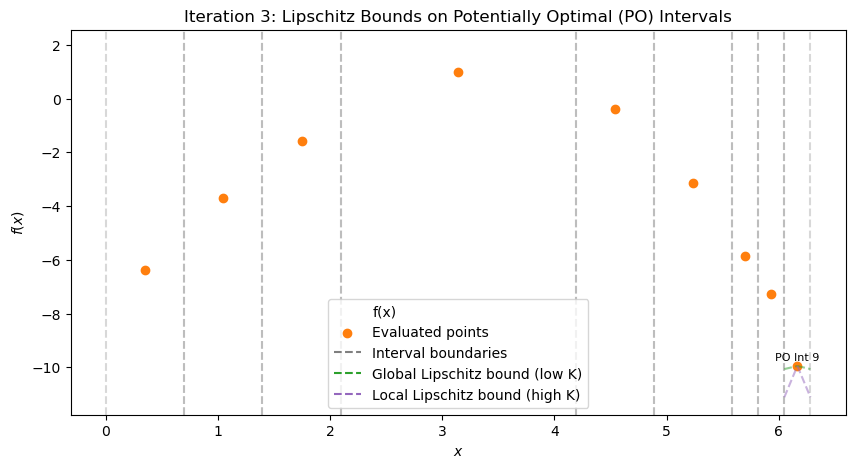
After 3 iterations, best x ≈ 6.167, f ≈ -9.947
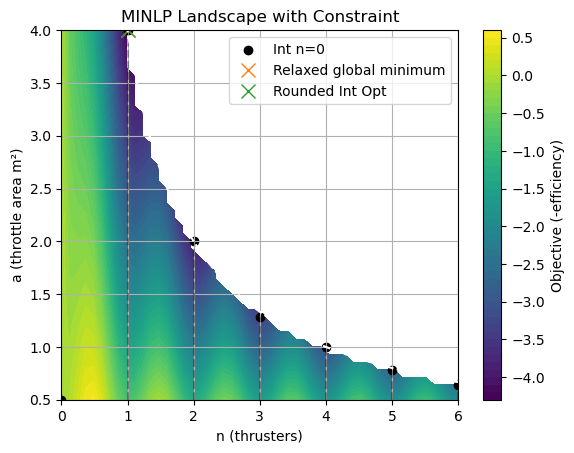
Exercise 3: MINLP with Penalty Relaxation and SHGO#
Solve a Mixed-Integer Non-Linear Program (MINLP) for thruster design: Optimize total thrust efficiency with integer number of thrusters \(n \in \{0,1,2,\dots,6\}\) (decision: activate additional units), continuous throttle area \(a \in [0.5, 4]\) m².
Model: Efficiency
(thrust output over cost; k=10 efficiency factor, c=5 fixed cost, d=2 per-thruster cost), constraint \(n \cdot a \leq 4\) (shared fuel line limit). Goal: Maximize efficiency (min -f).
3.a Integer relaxation and solving with SHGO#
Relax integer \(n\) to continuous with penalty (e.g., add \(\mu \sin^2(\pi n)\) to obj for periodicity, \(\mu=10\)). Use SHGO to solve relaxed problem.
3.b.#
Plot obj landscape (n vs. a, color=f), show integer points and relaxed solution. Round to nearest integer and verify. Discuss visualization of integer relaxation.
Starter Code:
# Lower and upper bounds for objective function
a_lb = 0.5
a_ub = 4.0
n_lb = 0
n_ub = 6
def obj_unrelaxed(z, mu=0.0):
n, a = z
k, c, d = 10, 5, 2
thrust_eff = n * k * a**0.8
cost = c + n * d
#TODO: add penalty for integer relaxation
return - (thrust_eff / cost)
# Bounds: n [0,3], a [0.5, 4]
bounds = [(n_lb , n_ub), (a_lb, a_ub)]
Exercise 3 Solution code:#
The code below contains the solution to Exercise 3.
# Import necessary libraries
import numpy as np
import matplotlib.pyplot as plt
from scipy.optimize import shgo
# Lower and upper bounds for objective function
a_lb = 0.5
a_ub = 4.0
n_lb = 0
n_ub = 6
# Objective with integer relaxation penalty (mu for sin^2(pi n))
def eff_obj(z, mu=1.0):
n, a = z
k, c, d = 10, 5, 2
thrust_eff = n * k * a**0.8
cost = c + n * d
int_penalty = mu * np.sin(np.pi * n)**2
return - (thrust_eff / cost) + int_penalty if cost > 0 else 0
# Inequality constraint: n * a <=4 ⇒ 4 - n*a >=0
def cons_fun(z):
n, a = z
return 4 - n * a
constraints = [{'type': 'ineq', 'fun': cons_fun}]
# Bounds: n [0,6], a [0.5,4]
bounds = [(n_lb , n_ub), (a_lb, a_ub)]
# Solve relaxed with SHGO (mu=10, with native constraints)
res = shgo(lambda z: eff_obj(z, mu=1), bounds, constraints=constraints, n=1000, iters=10)
print("Relaxed solution:", res.x, "Obj:", res.fun)
# Round to integer n
n_int = round(res.x[0])
a_opt = res.x[1]
print("Integer n:", n_int, "a:", a_opt)
# Plot landscape (mask infeasible)
n_vals = np.linspace(0, 6, 50)
a_vals = np.linspace(0.5, 4, 50)
N, A = np.meshgrid(n_vals, a_vals)
F = np.vectorize(lambda n,a: eff_obj([n,a]) if n*a <=4 else np.nan)(N, A) # Mask infeasible
plt.contourf(N, A, F, levels=50, cmap='viridis')
plt.colorbar(label='Objective (-efficiency)')
for ni in range(7): # Integers 0-6
a_max = 4 / ni if ni > 0 else 4
a_valid = a_vals[a_vals <= a_max]
f_ni = [eff_obj([ni, ai]) for ai in a_valid]
plt.plot([ni]*len(a_valid), a_valid, 'k--', alpha=0.3)
if f_ni:
plt.scatter(ni, a_valid[np.argmin(f_ni)], c='k', label=f'Int n={ni}' if ni==0 else None)
plt.plot(res.x[0], res.x[1], 'x', color='tab:orange', label='Relaxed global minimum', markersize=10)
plt.plot(n_int, a_opt, 'x', color='tab:green', label='Rounded Int Opt', markersize=10)
plt.contour(N, A, 4 - N*A, levels=[0], colors='white', linestyles='--', label='Cons: n*a=4')
plt.xlabel('n (thrusters)')
plt.ylabel('a (throttle area m²)')
plt.title('MINLP Landscape with Constraint')
plt.legend()
plt.grid(True)
plt.show()
Relaxed solution: [1. 4.] Obj: -4.330618761458282
Integer n: 1 a: 4.0
/tmp/ipykernel_278676/1704768151.py:59: UserWarning: The following kwargs were not used by contour: 'label'
plt.contour(N, A, 4 - N*A, levels=[0], colors='white', linestyles='--', label='Cons: n*a=4')
res
message: Optimization terminated successfully.
success: True
fun: -4.330618761458282
funl: [-4.331e+00 -4.331e+00 ... -4.415e-02 -3.805e-02]
x: [ 1.000e+00 4.000e+00]
xl: [[ 1.000e+00 4.000e+00]
[ 1.000e+00 4.000e+00]
...
[ 6.661e-02 6.094e-01]
[ 6.176e-02 5.547e-01]]
nit: 10
nfev: 4156
nlfev: 905
nljev: 272
nlhev: 0
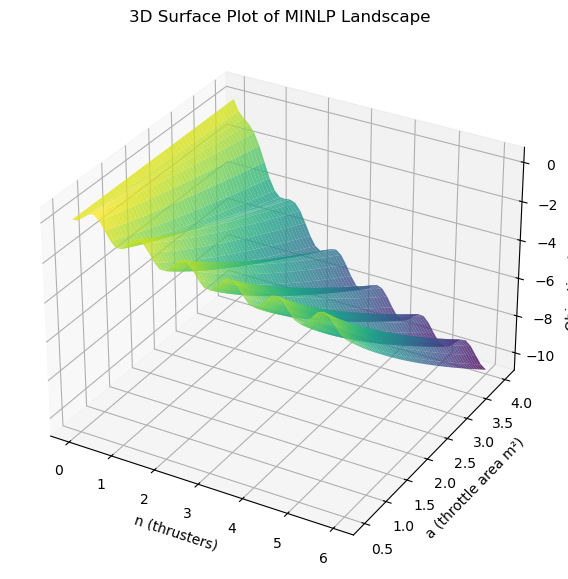
Below is a 3D plot with better visualization of the relaxed landscape:
# Import necessary libraries
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
# Define variables from the provided code
a_lb = 0.5
a_ub = 4.0
n_lb = 0
n_ub = 6
def eff_obj(z, mu=1.0):
n, a = z
k, c, d = 10, 5, 2
thrust_eff = n * k * a**0.8
cost = c + n * d
penalty = mu * np.sin(np.pi * n)**2 # Integer relaxation
return - (thrust_eff / cost) + penalty if cost > 0 else 0
# Generate grid
n_vals = np.linspace(n_lb, n_ub, 50)
a_vals = np.linspace(a_lb, a_ub, 50)
N, A = np.meshgrid(n_vals, a_vals)
F = np.vectorize(lambda n,a: eff_obj([n,a]))(N, A)
# Create 3D plot
fig = plt.figure(figsize=(10, 7))
ax = fig.add_subplot(111, projection='3d')
ax.plot_surface(N, A, F, cmap='viridis', alpha=0.8)
# Labels and title
ax.set_xlabel('n (thrusters)')
ax.set_ylabel('a (throttle area m²)')
ax.set_zlabel('Objective (-efficiency)')
ax.set_title('3D Surface Plot of MINLP Landscape')
plt.show()
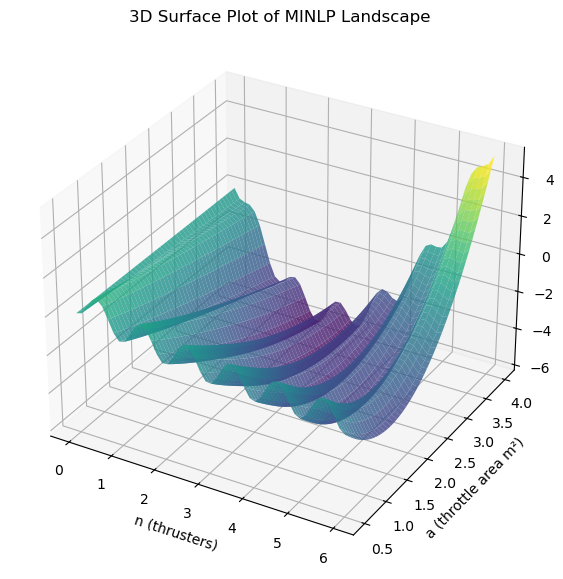
Note, to understand how the solution can also be found by incorporating the constraint as a penalty, see the code below which incorporates both penalties (integer and constraint) in the objective function.
def eff_obj(z, mu=1.5, rho=0.04):
n, a = z
k, c, d = 10, 5, 2
thrust_eff = n * k * a**0.8
cost = c + n * d
int_penalty = mu * np.sin(np.pi * n)**2
cons_penalty = rho * max(0, n * a - 4)**2
return - (thrust_eff / cost) + int_penalty + cons_penalty if cost > 0 else 0
# Generate grid
n_vals = np.linspace(n_lb, n_ub, 50)
a_vals = np.linspace(a_lb, a_ub, 50)
N, A = np.meshgrid(n_vals, a_vals)
F = np.vectorize(lambda n,a: eff_obj([n,a]))(N, A)
# Create 3D plot
fig = plt.figure(figsize=(10, 7))
ax = fig.add_subplot(111, projection='3d')
ax.plot_surface(N, A, F, cmap='viridis', alpha=0.8)
# Labels and title
ax.set_xlabel('n (thrusters)')
ax.set_ylabel('a (throttle area m²)')
ax.set_zlabel('Objective (-efficiency)')
ax.set_title('3D Surface Plot of MINLP Landscape')
plt.show()
Exercise 4: Finding and Characterizing Lagrange Points in the Earth-Sun System#
In the circular restricted three-body problem (CR3BP), a third body (e.g., a spacecraft) moves under the gravitational influence of two massive bodies (e.g., Earth and Sun) in circular orbits around their common center of mass. The Lagrange points are five equilibrium solutions where the third body can remain stationary relative to the two primaries. These points are critical in space engineering for missions like satellite placement (e.g., at L1 for solar observation). This exercise builds on Chapter 3 (non-linearity and chaos in dynamical systems), Chapter 5 (simulation of ODE systems), and Chapter 9 (global optimization with SHGO). You will:
Use SHGO to find all Lagrange points at once by globally minimizing the squared norm of the gradient of the effective potential (since equilibria are critical points where \(\nabla U = 0\), and SHGO finds all local minima of \(\|\nabla U\|^2\)). Characterize their stability by linearizing the dynamics and analyzing eigenvalues (relating to chaotic behavior if unstable). Simulate perturbed orbits around selected points to visualize stability (using ODE integration).
Use the non-dimensional CR3BP equations, with mass ratio \(\mu = m_2 / (m_1 + m_2)\) where \(m_1\) is Sun, \(m_2\) is Earth (\(\mu \approx 3 \times 10^{-6}\)).
Theory Recap#
The effective potential in CR3BP is \(U(x,y) = \frac{1}{2}(x^2 + y^2) + \frac{1-\mu}{r_1} + \frac{\mu}{r_2}\), where \(r_1 = \sqrt{(x + \mu)^2 + y^2}\), \(r_2 = \sqrt{(x - 1 + \mu)^2 + y^2}\). Equilibria satisfy \(\nabla U = 0\) (zero acceleration in rotating frame). To find all with SHGO, minimize \(f(x,y) = \|\nabla U(x,y)\|^2\), where minima of 0 are the equilibria.
The state-space dynamics (for simulation): \(\ddot{x} = 2\dot{y} + \frac{\partial U}{\partial x}\), \(\ddot{y} = -2\dot{x} + \frac{\partial U}{\partial y}\).
Stability: Linearize around equilibrium \(\mathbf{x}^*\) to get \(\dot{\mathbf{\delta}} = A \mathbf{\delta}\), where \(A\) is the Jacobian. If all eigenvalues have negative real parts, stable; positive real parts indicate instability (saddles common in CR3BP).
4.a Find All Lagrange Points with SHGO#
Set up the squared gradient norm \(f(x,y) = U_x^2 + U_y^2\).
Use SHGO over a bounded domain (e.g., \([-2, 2] \times [-2, 2]\)) to find all minima (res.xl where funl ≈ 0).
HINT: Because this objective function is a valley function, you will need to filter out the non-convex points where \(f\) is far from zero.
4.b: Characterize Stability#
Compute the Jacobian \(A\) at each point: $\(A = \begin{bmatrix} 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \\ U_{xx} & U_{xy} & 0 & 2 \\ U_{xy} & U_{yy} & -2 & 0 \end{bmatrix}\)\( Where second derivatives from \)U$.
4.c Simulate and Visualize Orbits#
Perturb each point slightly and integrate the ODEs to observe behavior (stable: bounded; unstable: divergence).
Stub code:
import numpy as np
from scipy.optimize import shgo
import matplotlib.pyplot as plt
mu = 3.003e-6 # Earth-Sun mass ratio
def U_grad(x_y):
x, y = x_y
r1 = np.sqrt((x + mu)**2 + y**2)
r2 = np.sqrt((x - 1 + mu)**2 + y**2)
Ux = x - (1 - mu) * (x + mu) / r1**3 - mu * (x - 1 + mu) / r2**3
Uy = y - (1 - mu) * y / r1**3 - mu * y / r2**3
return Ux, Uy
Solution code for Exercise 4:#
import numpy as np
from scipy.optimize import shgo
import matplotlib.pyplot as plt
mu = 3.003e-6 # Earth-Sun mass ratio
def U_grad(x_y):
x, y = x_y
r1 = np.sqrt((x + mu)**2 + y**2)
r2 = np.sqrt((x - 1 + mu)**2 + y**2)
Ux = x - (1 - mu) * (x + mu) / r1**3 - mu * (x - 1 + mu) / r2**3
Uy = y - (1 - mu) * y / r1**3 - mu * y / r2**3
return Ux, Uy
def grad_norm_squared(x_y):
Ux, Uy = U_grad(x_y)
return Ux**2 + Uy**2
bounds = [(-2, 2), (-2, 2)]
# Run SHGO with sufficient sampling for refinement
res = shgo(grad_norm_squared, bounds, n=3e6, iters=1) # n: samples/iter, iters: refinement levels
# Filter points near zero norm (true equilibria)
near_zero_mask = np.isclose(res.funl, 0, atol=1e-10)
filtered_xl = res.xl[near_zero_mask]
filtered_funl = res.funl[near_zero_mask]
# Select top 5 with lowest funl (best approximations to zero)
sorted_idx = np.argsort(filtered_funl)[:5]
equilibria = filtered_xl[sorted_idx]
# Optional: Deduplicate if close (e.g., numerical duplicates)
unique_idx = np.unique(np.round(equilibria, decimals=4), axis=0, return_index=True)[1]
equilibria = equilibria[unique_idx]
print("Filtered and top 5 Lagrange points:\n", equilibria)
# Plot points with primaries
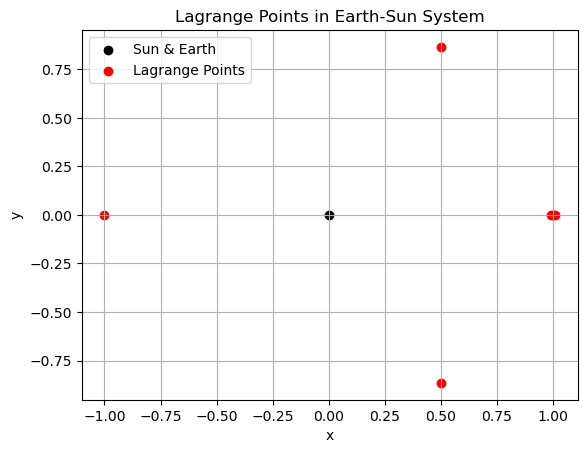
plt.scatter([-mu, 1 - mu], [0, 0], color='k', label='Sun & Earth')
plt.scatter(equilibria[:, 0], equilibria[:, 1], color='r', label='Lagrange Points')
plt.title('Lagrange Points in Earth-Sun System')
plt.xlabel('x')
plt.ylabel('y')
plt.legend()
plt.grid(True)
plt.show()
Filtered and top 5 Lagrange points:
[[-1.00000125e+00 1.23487670e-14]
[ 5.01737076e-01 -8.65018440e-01]
[ 5.01737163e-01 8.65018380e-01]
[ 9.90027117e-01 -2.57112277e-24]
[ 1.01003358e+00 3.26951978e-09]]
res
message: Optimization terminated successfully.
success: True
fun: 5.3740028696787734e-18
funl: [ 5.374e-18 2.094e-16 ... 1.227e-04 1.227e-04]
x: [-1.000e+00 1.235e-14]
xl: [[-1.000e+00 1.235e-14]
[ 5.017e-01 -8.650e-01]
...
[ 9.903e-01 -3.906e-03]
[ 9.903e-01 3.906e-03]]
nit: 1
nfev: 3006876
nlfev: 6876
nljev: 2037
nlhev: 0
# Task 2:
def jacobian(point):
x, y = point
r1 = np.sqrt((x + mu)**2 + y**2)
r2 = np.sqrt((x - 1 + mu)**2 + y**2)
Uxx = 1 - (1 - mu)/r1**3 + 3*(1 - mu)*(x + mu)**2/r1**5 - mu/r2**3 + 3*mu*(x - 1 + mu)**2/r2**5
Uxy = 3*(1 - mu)*(x + mu)*y/r1**5 + 3*mu*(x - 1 + mu)*y/r2**5
Uyy = 1 - (1 - mu)/r1**3 + 3*(1 - mu)*y**2/r1**5 - mu/r2**3 + 3*mu*y**2/r2**5
return np.array([[0, 0, 1, 0],
[0, 0, 0, 1],
[Uxx, Uxy, 0, 2],
[Uxy, Uyy, -2, 0]])
# For each equilibrium
for i, point in enumerate(equilibria):
eigs = np.linalg.eigvals(jacobian(point))
print(f"Point {i+1} {point}: eigenvalues {eigs}")
# Classify: unstable if any Re(eig) > 0
# Task 3: Simulate orbits near equilibria
from scipy.integrate import solve_ivp
def cr3bp_dynamics(t, state):
x, y, vx, vy = state
r1 = np.sqrt((x + mu)**2 + y**2)
r2 = np.sqrt((x - 1 + mu)**2 + y**2)
ax = 2*vy + x - (1 - mu)*(x + mu)/r1**3 - mu*(x - 1 + mu)/r2**3
ay = -2*vx + y - (1 - mu)*y/r1**3 - mu*y/r2**3
return [vx, vy, ax, ay]
# Example: Perturb first equilibrium (e.g., L1)
eq = equilibria[0] # Change index for others
init = [eq[0] + 1e-3, eq[1] + 1e-3, 0, 0]
sol = solve_ivp(cr3bp_dynamics, [0, 10], init, rtol=1e-12)
plt.plot(sol.y[0], sol.y[1])
plt.scatter([-mu, 1 - mu], [0, 0], color='k', label='Primaries')
plt.scatter(eq[0], eq[1], color='r', label='Equilibrium')
plt.title('Orbit near Equilibrium (Unstable Example)')
plt.xlabel('x')
plt.ylabel('y')
plt.legend()
plt.grid(True)
plt.show()
# Repeat for a stable point (e.g., L4: expect bounded Lissajous orbit)
Improving the Objective Function for Lagrange Points Search#
The current objective function \(f(x,y) = U_x^2 + U_y^2\) (squared L2 norm of the gradient) creates parabolic valleys around the equilibria (where \(f=0\)), which are relatively smooth and wide. This can make it harder for global optimizers like SHGO to distinguish and converge precisely to the true zeros, especially in flat or low-gradient regions, requiring high sampling (n ≥ 2e6) to resolve all five points reliably.
To improve, we can use the unsquared L2 norm \(f(x,y) = \sqrt{U_x^2 + U_y^2}\) or the L1 norm \(f(x,y) = |U_x| + |U_y|\). These create sharper, “V-shaped” or cone-like valleys at the minima, amplifying the “penalty” away from zero and making the minima more pronounced for the optimizer to detect with fewer samples. The L1 norm is particularly sharp (less differentiable but effective for global search). This doesn’t change the locations of minima but steepens the landscape, reducing the need for excessive sampling.
Additionally, tighten the search bounds to \([-1.5, 1.5] \times [-1, 1]\) (covering known Lagrange point locations) to focus computation and reduce n to ~1e5–5e5 for similar accuracy.
import numpy as np
from scipy.optimize import shgo
import matplotlib.pyplot as plt
mu = 3.003e-6 # Earth-Sun mass ratio
def U_grad(x_y):
x, y = x_y
r1 = np.sqrt((x + mu)**2 + y**2)
r2 = np.sqrt((x - 1 + mu)**2 + y**2)
Ux = x - (1 - mu) * (x + mu) / r1**3 - mu * (x - 1 + mu) / r2**3
Uy = y - (1 - mu) * y / r1**3 - mu * y / r2**3
return Ux, Uy
def grad_norm_l1(x_y):
Ux, Uy = U_grad(x_y)
return np.abs(Ux) + np.abs(Uy) # Sharper L1 norm
bounds = [(-1.5, 1.5), (-1, 1)] # Tighter bounds
# Run SHGO
res = shgo(grad_norm_l1, bounds, n=100000, iters=1, sampling_method='sobol')
# Filter and select top 5
near_zero_mask = np.isclose(res.funl, 0, atol=1e-5)
filtered_xl = res.xl[near_zero_mask]
filtered_funl = res.funl[near_zero_mask]
sorted_idx = np.argsort(filtered_funl)[:5]
equilibria = filtered_xl[sorted_idx]
# Deduplicate
unique_idx = np.unique(np.round(equilibria, decimals=4), axis=0, return_index=True)[1]
equilibria = equilibria[unique_idx]
print("Lagrange points:\n", equilibria)
# Plot
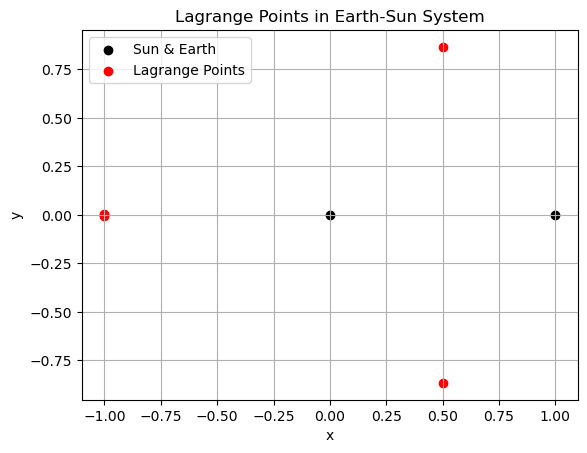
plt.scatter([-mu, 1 - mu], [0, 0], color='k', label='Sun & Earth')
plt.scatter(equilibria[:, 0], equilibria[:, 1], color='r', label='Lagrange Points')
plt.title('Lagrange Points in Earth-Sun System')
plt.xlabel('x')
plt.ylabel('y')
plt.legend()
plt.grid(True)
plt.show()
Lagrange points:
[[-9.99980435e-01 -6.45250719e-03]
[-1.00000125e+00 -1.82730875e-05]
[-9.99978824e-01 6.69730597e-03]
[ 4.99437565e-01 -8.66348156e-01]
[ 4.99443831e-01 8.66344527e-01]]
res
message: Optimization terminated successfully.
success: True
fun: 1.0300229000331096e-07
funl: [ 1.030e-07 2.656e-07 ... 3.917e-04 1.259e-03]
x: [-9.993e-01 -3.748e-02]
xl: [[-9.993e-01 -3.748e-02]
[ 4.682e-01 8.836e-01]
...
[ 9.961e-01 8.757e-02]
[ 9.988e-01 -4.884e-02]]
nit: 1
nfev: 26695
nlfev: 18503
nljev: 2064
nlhev: 0
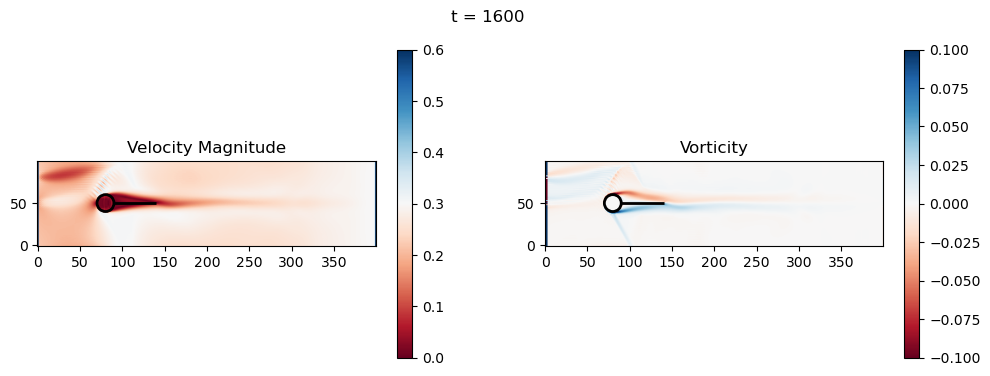
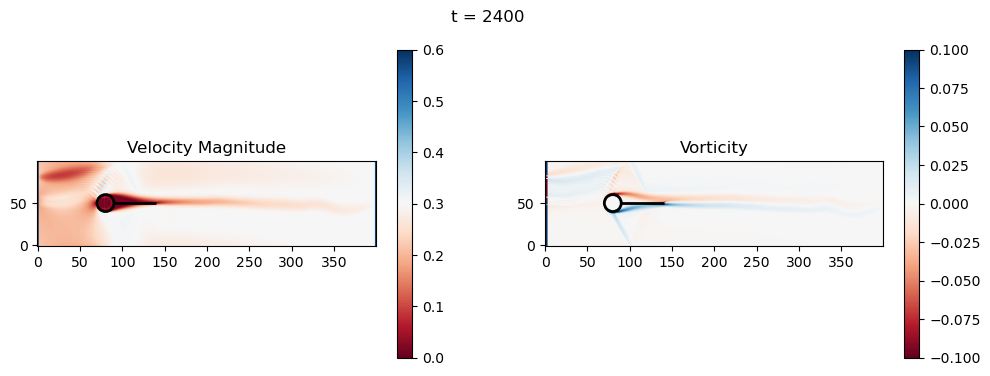
(Optional mini project) Exercise 5: Geometry Optimization of fin shapes for Re-Entry Vehicles#
Recall from Chapter 6 we conducted a simulation of a probe with a a fin added to reduce the turbulence and drag forces during re-entry. In this exercise will extend that simulation to optimize the fin length.
5.a Objective function formulation#
Based on the simulation result from Chapter 6, define an objective function based on the derived criteria. Scale the outputs so that the objective function will behave appropriately with respect to material cost and performance (e.g., drag reduction).
HINT: This objective function is expected to have a relatively noisy output even at equilibrium due to the non-linear fluid dynamics simulation. There do not expect to find a “perfect” solution for the fin length. Instead you are looking for a “good enough” solution that balances performance and cost and defining what that means in the objective function is precisely the goal of this part of the exercise.
5.b Optimization using SHGO#
Wrap the code below into an objective function that takes fin length as input and returns the objective value. Use SHGO to find the optimal fin length within a reasonable range (e.g., 10 to 100 lattice units).
5.c Results#
Plot the final result of your optimized probe.
5.d Discussion#
Play around with the simulation, e.g. change the atmospheric viscosity, inflow speed, or grid resolution. Discuss how these changes affect the optimal fin length and the overall performance of the probe in different scenarios.
import numpy as np
import matplotlib.pyplot as plt
# Physical parameters
nx, ny = 400, 100 # Grid size
cx, cy, r = nx//5, ny//2, ny//10 # Cylinder position and radius
u_in_max = 0.01 # Even lower for stability
u_in_max = 0.1 # Higher to see vortex shedding
u_in_max = 0.4 # Higher to see vortex shedding
nu = 0.02 # Increased for more viscosity
tau = 3*nu + 0.5 # Relaxation time
#nt = 20000 # Time steps
nt = 4000 # Time steps
plot_every = 200
dx = 1.0 # Lattice spacing
fin_length = 50 # Trailing fin length (lattice units; adjustable)
# LBM setup (D2Q9)
w = np.array([4/9, 1/9, 1/9, 1/9, 1/9, 1/36, 1/36, 1/36, 1/36]) # Weights
cx_lbm = np.array([0, 1, 0, -1, 0, 1, -1, -1, 1]) # x velocities
cy_lbm = np.array([0, 0, 1, 0, -1, 1, 1, -1, -1]) # y velocities
# Initialize distributions with uniform flow equilibrium
def equilibrium(rho, ux, uy):
ux = np.clip(ux, -0.3, 0.3)
uy = np.clip(uy, -0.3, 0.3)
if np.isscalar(rho):
rho = np.array([rho])
ux = np.array([ux])
uy = np.array([uy])
rho = np.asanyarray(rho)
ux = np.asanyarray(ux)
uy = np.asanyarray(uy)
shape = rho.shape
rho_flat = rho.flatten()
ux_flat = ux.flatten()
uy_flat = uy.flatten()
n = len(rho_flat)
cu = 3 * (np.tile(cx_lbm[:, None], (1, n)) * np.tile(ux_flat[None, :], (9, 1)) +
np.tile(cy_lbm[:, None], (1, n)) * np.tile(uy_flat[None, :], (9, 1)))
uu = 3/2 * (ux_flat**2 + uy_flat**2)
feq_flat = np.tile(w[:, None], (1, n)) * np.tile(rho_flat[None, :], (9, 1)) * (1 + cu + 0.5*cu**2 - np.tile(uu[None, :], (9, 1)))
feq_flat = np.nan_to_num(feq_flat)
feq = feq_flat.reshape(9, *shape)
return feq
f = equilibrium(np.ones((nx,ny)), np.ones((nx,ny))*0.001, np.zeros((nx,ny))) # Small initial u for equilibrium
# Cylinder mask
X, Y = np.meshgrid(np.arange(nx), np.arange(ny), indexing='ij')
obstacle = (X - cx)**2 + (Y - cy)**2 <= r**2
# Add trailing fin: horizontal line at y=cy, from x = cx + r to cx + r + fin_length
fin_start_x = cx + r
fin_end_x = cx + r + fin_length
fin = (Y == cy) & (X >= fin_start_x) & (X <= fin_end_x)
obstacle = obstacle | fin
def collide(f, rho, ux, uy):
feq = equilibrium(rho, ux, uy)
return f - (f - feq) / tau
def stream(f):
for i in range(1, 9):
f[i] = np.roll(f[i], shift=(cx_lbm[i], cy_lbm[i]), axis=(0, 1))
return f
def bounce_back(f, obstacle):
opp = [0, 3, 4, 1, 2, 7, 8, 5, 6] # Opposite directions
f_temp = f.copy()
for i in range(1, 9):
f[i, obstacle] = f_temp[opp[i], obstacle]
return f
def apply_inlet_outlet(f, rho, ux, uy, u_in_current):
# Inlet (left): Equilibrium BC for smoother
feq_left = equilibrium(1.0, u_in_current, 0.0)
f[:, 0, :] = feq_left.squeeze()[:, None]
# Outlet (right): copy
f[:, -1, :] = f[:, -2, :]
return f
def apply_sponge(f, rho, ux, uy):
# Sponge at outlet (last 20 columns): relax to equilibrium
sponge_start = nx - 20
for i in range(sponge_start, nx):
sigma = (i - sponge_start) / 20.0 # Linear damping
feq = equilibrium(rho[i, :], ux[i, :], uy[i, :])
f[:, i, :] = f[:, i, :] * (1 - sigma) + feq * sigma
return f
# Simulation loop
for t in range(nt):
# Stream
f = stream(f)
# Boundaries
f = bounce_back(f, obstacle)
# Macroscopic variables
rho = np.sum(f, axis=0)
rho = np.clip(rho, 0.1, 10.0)
ux = np.sum(f * cx_lbm[:, None, None], axis=0) / rho
uy = np.sum(f * cy_lbm[:, None, None], axis=0) / rho
# Ramp inlet velocity (longer ramp)
u_in_current = u_in_max * min(1.0, t / 1000.0)
f = apply_inlet_outlet(f, rho, ux, uy, u_in_current)
f = apply_sponge(f, rho, ux, uy)
# Collide
f = collide(f, rho, ux, uy)
# Wait for the flow to develop before plotting
if t > 1000:
if t % plot_every == 0 and t > 0:
vorticity = (np.roll(uy, -1, axis=0) - np.roll(uy, 1, axis=0)) / (2*dx) - \
(np.roll(ux, -1, axis=1) - np.roll(ux, 1, axis=1)) / (2*dx)
velocity_mag = np.sqrt(ux**2 + uy**2)
# Downstream region for metrics (x from fin_end_x to nx-50, full y)
downstream_start = int(fin_end_x) if 'fin_end_x' in locals() else nx//2
downstream = slice(downstream_start, nx-50)
vort_mag_down = np.mean(np.abs(vorticity[downstream, :]))
vel_var_down = np.var(ux[downstream, :] + uy[downstream, :]) # TKE proxy (variance of velocity components)
print(f"t={t}: Downstream Avg Vorticity Mag = {vort_mag_down:.4f}, TKE Proxy = {vel_var_down:.4f}")
# Cylinder drag (simple approximation: integrate x-momentum loss around cylinder)
cyl_slice = slice(cx - r - 5, cx + r + 5)
drag_approx = np.sum(rho[cyl_slice, :] * ux[cyl_slice, :] * dx) # Proxy for drag (momentum flux)
print(f"t={t}: Cylinder Drag Proxy = {drag_approx:.4f}")
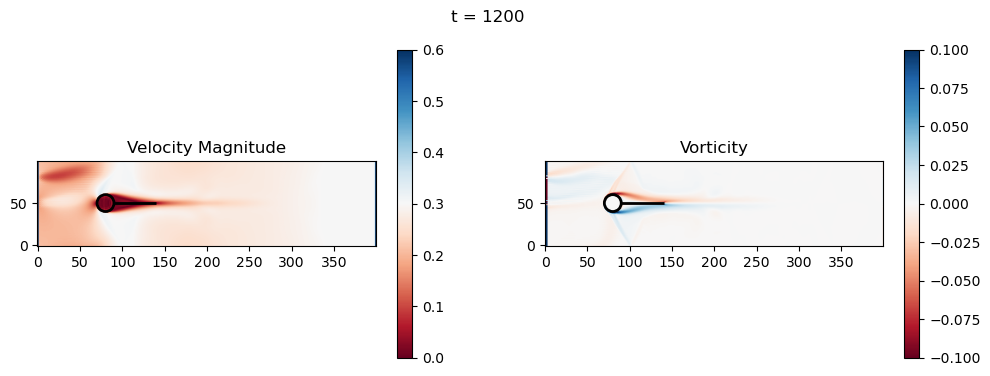
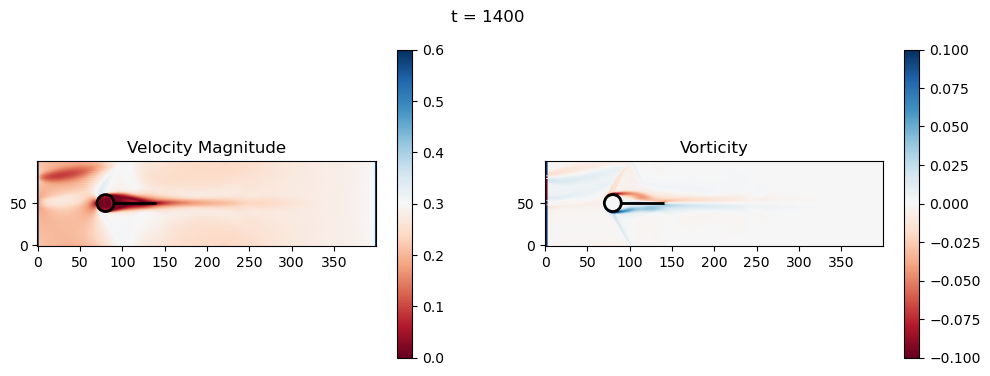
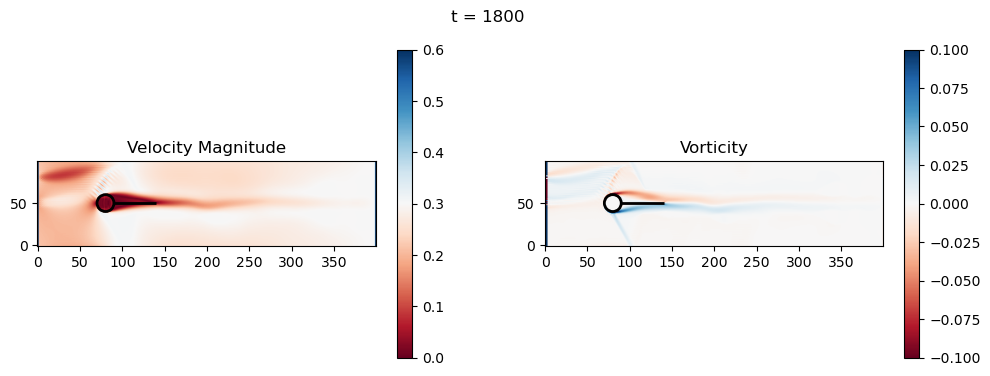
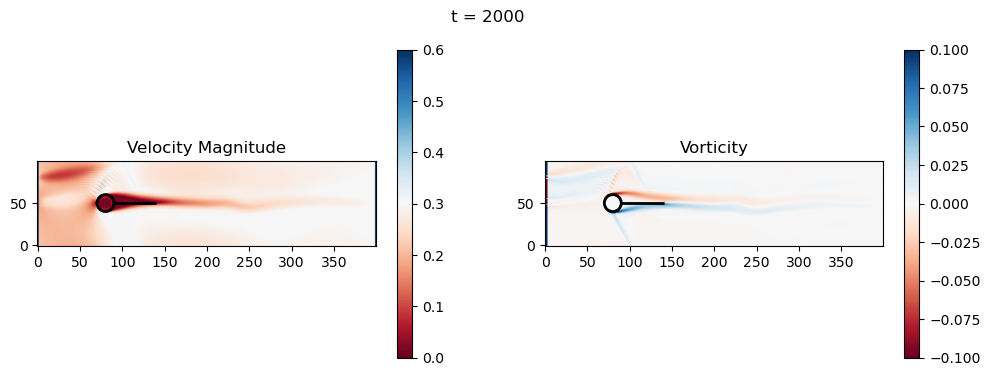
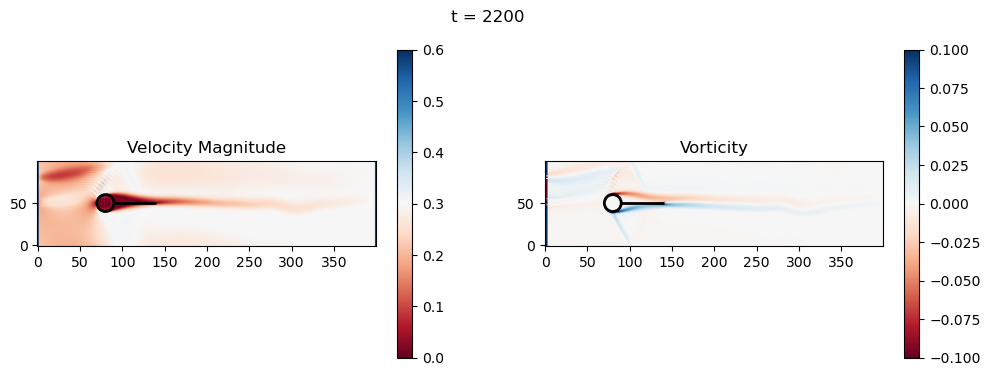
fig, axs = plt.subplots(1, 2, figsize=(12, 4))
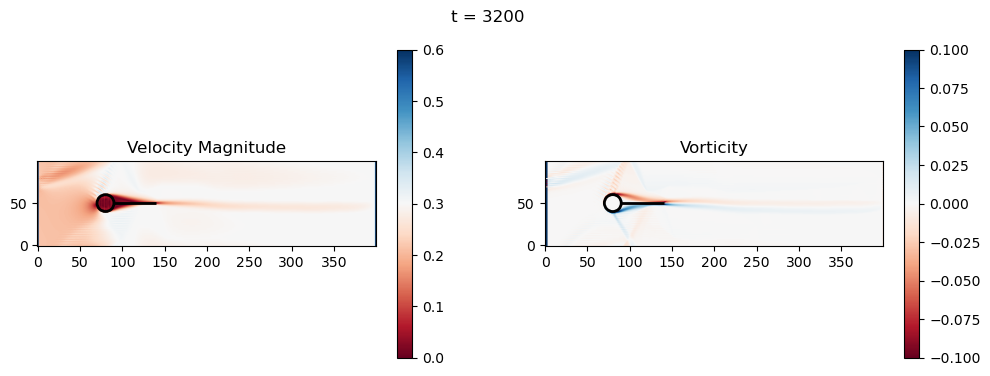
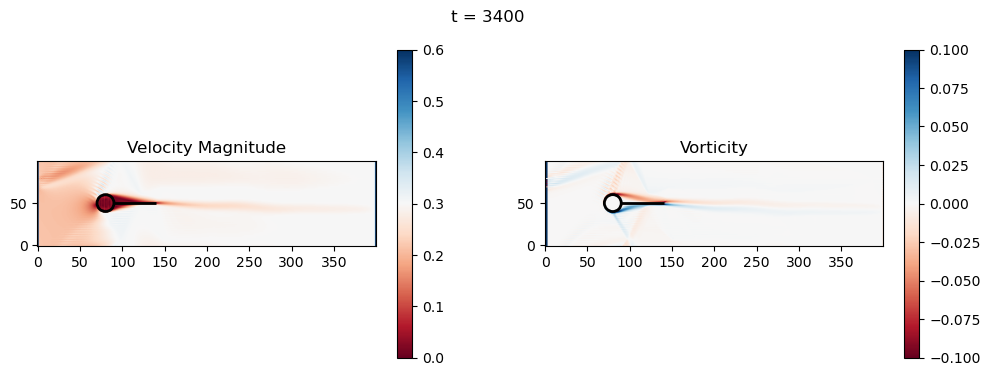
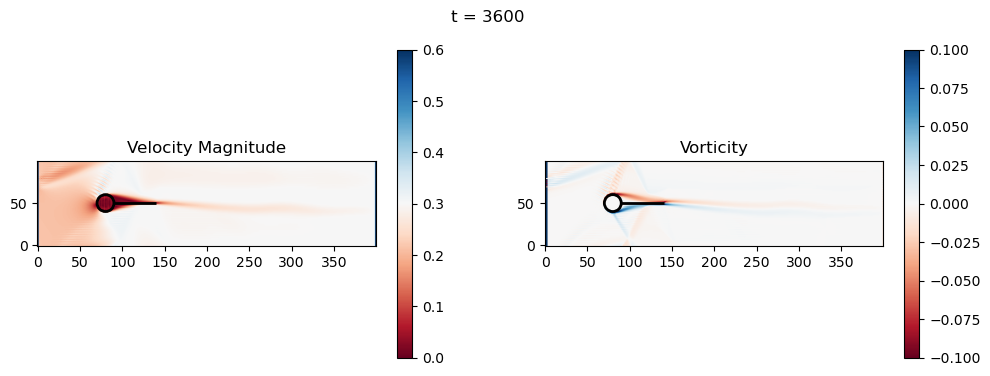
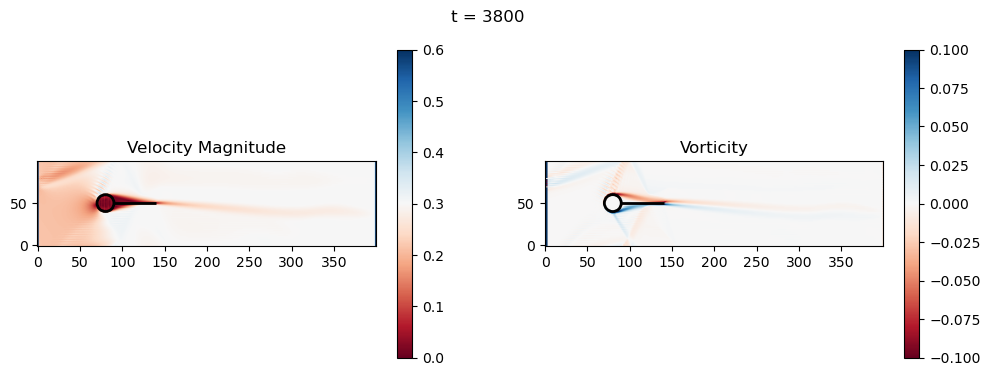
# Velocity magnitude
im0 = axs[0].imshow(velocity_mag.T, origin='lower', cmap='RdBu', vmin=0, vmax=u_in_max*1.5)
axs[0].set_title('Velocity Magnitude')
fig.colorbar(im0, ax=axs[0])
# Add black lines for cylinder and fin
circle = plt.Circle((cx, cy), r, color='black', fill=False, linewidth=2)
axs[0].add_patch(circle)
axs[0].hlines(cy, fin_start_x, fin_end_x, colors='black', linewidth=2)
# Vorticity
im1 = axs[1].imshow(vorticity.T, origin='lower', cmap='RdBu', vmin=-0.1, vmax=0.1)
axs[1].set_title('Vorticity')
fig.colorbar(im1, ax=axs[1])
# Add black lines for cylinder and fin
circle = plt.Circle((cx, cy), r, color='black', fill=False, linewidth=2)
axs[1].add_patch(circle)
axs[1].hlines(cy, fin_start_x, fin_end_x, colors='black', linewidth=2)
fig.suptitle(f't = {t}')
plt.show()
t=1200: Downstream Avg Vorticity Mag = 0.0012, TKE Proxy = 0.0004
t=1200: Cylinder Drag Proxy = 388.5402
t=1400: Downstream Avg Vorticity Mag = 0.0016, TKE Proxy = 0.0005
t=1400: Cylinder Drag Proxy = 383.9169
t=1600: Downstream Avg Vorticity Mag = 0.0021, TKE Proxy = 0.0009
t=1600: Cylinder Drag Proxy = 376.9995
t=1800: Downstream Avg Vorticity Mag = 0.0024, TKE Proxy = 0.0011
t=1800: Cylinder Drag Proxy = 376.9451
t=2000: Downstream Avg Vorticity Mag = 0.0024, TKE Proxy = 0.0010
t=2000: Cylinder Drag Proxy = 377.3504
t=2200: Downstream Avg Vorticity Mag = 0.0024, TKE Proxy = 0.0008
t=2200: Cylinder Drag Proxy = 378.1023
t=2400: Downstream Avg Vorticity Mag = 0.0024, TKE Proxy = 0.0006
t=2400: Cylinder Drag Proxy = 378.1402
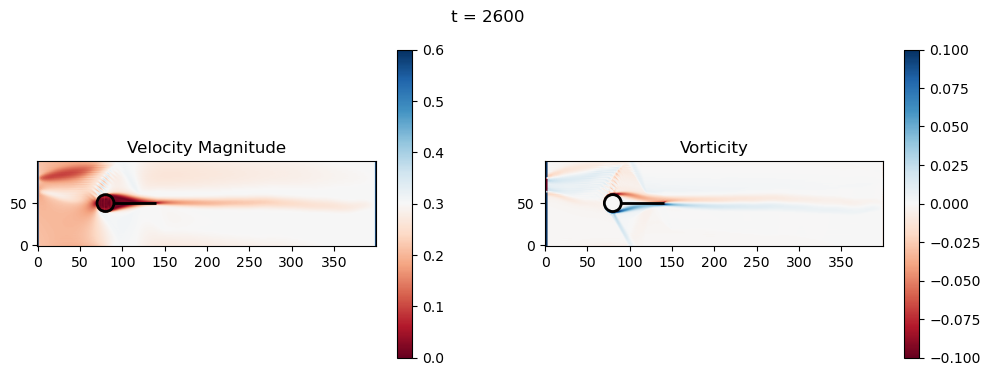
t=2600: Downstream Avg Vorticity Mag = 0.0023, TKE Proxy = 0.0006
t=2600: Cylinder Drag Proxy = 379.1670
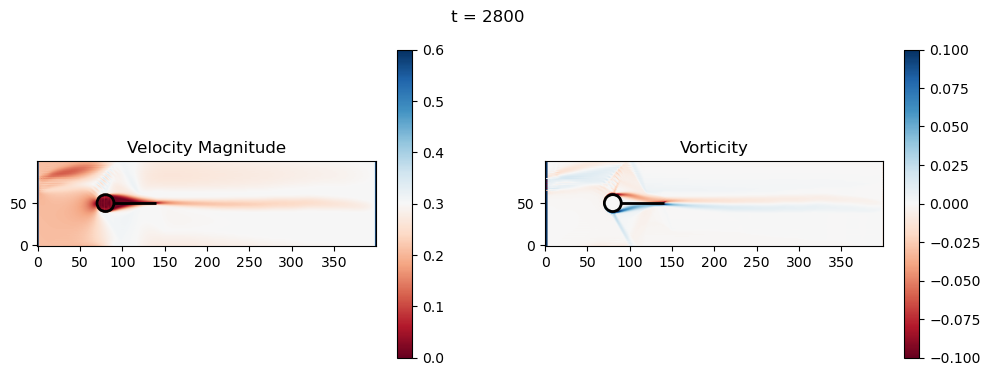
t=2800: Downstream Avg Vorticity Mag = 0.0022, TKE Proxy = 0.0005
t=2800: Cylinder Drag Proxy = 383.2964
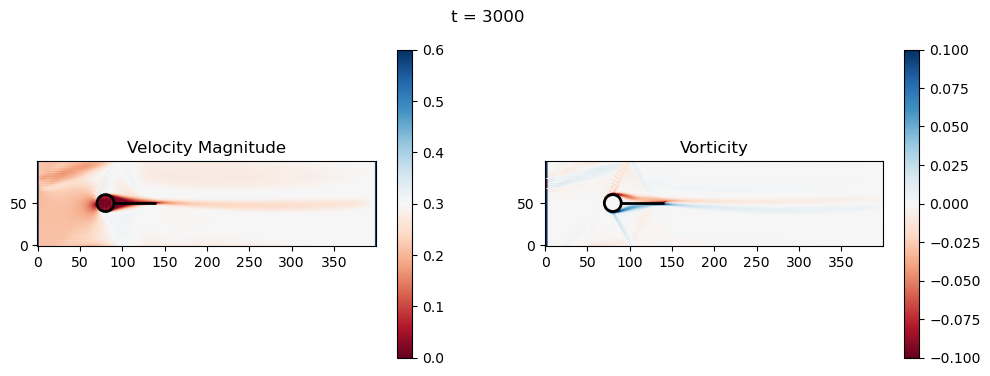
t=3000: Downstream Avg Vorticity Mag = 0.0019, TKE Proxy = 0.0004
t=3000: Cylinder Drag Proxy = 388.4117
t=3200: Downstream Avg Vorticity Mag = 0.0016, TKE Proxy = 0.0003
t=3200: Cylinder Drag Proxy = 386.6070
t=3400: Downstream Avg Vorticity Mag = 0.0015, TKE Proxy = 0.0003
t=3400: Cylinder Drag Proxy = 386.6438
t=3600: Downstream Avg Vorticity Mag = 0.0015, TKE Proxy = 0.0003
t=3600: Cylinder Drag Proxy = 386.1305
t=3800: Downstream Avg Vorticity Mag = 0.0014, TKE Proxy = 0.0002
t=3800: Cylinder Drag Proxy = 386.1483
import numpy as np
import matplotlib.pyplot as plt
def obj(l, plot_result=False, nt=4000):
"""
Objective function
Params:
l : length of the fin (m), default 50
Args:
plot_result, Bool, choose whether or not to plot the final simulation result
nt : int, number of time steps to simulate for
"""
# Physical parameters
nx, ny = 400, 100 # Grid size
cx, cy, r = nx//5, ny//2, ny//10 # Cylinder position and radius
u_in_max = 0.01 # Even lower for stability
u_in_max = 0.1 # Higher to see vortex shedding
u_in_max = 0.4 # Higher to see vortex shedding
nu = 0.02 # Increased for more viscosity
tau = 3*nu + 0.5 # Relaxation time
#nt = 20000 # Time steps
#nt = 4000 # Time steps
plot_every = 200
dx = 1.0 # Lattice spacing
fin_length = l # Trailing fin length (lattice units; adjustable)
# LBM setup (D2Q9)
w = np.array([4/9, 1/9, 1/9, 1/9, 1/9, 1/36, 1/36, 1/36, 1/36]) # Weights
cx_lbm = np.array([0, 1, 0, -1, 0, 1, -1, -1, 1]) # x velocities
cy_lbm = np.array([0, 0, 1, 0, -1, 1, 1, -1, -1]) # y velocities
# Initialize distributions with uniform flow equilibrium
def equilibrium(rho, ux, uy):
ux = np.clip(ux, -0.3, 0.3)
uy = np.clip(uy, -0.3, 0.3)
if np.isscalar(rho):
rho = np.array([rho])
ux = np.array([ux])
uy = np.array([uy])
rho = np.asanyarray(rho)
ux = np.asanyarray(ux)
uy = np.asanyarray(uy)
shape = rho.shape
rho_flat = rho.flatten()
ux_flat = ux.flatten()
uy_flat = uy.flatten()
n = len(rho_flat)
cu = 3 * (np.tile(cx_lbm[:, None], (1, n)) * np.tile(ux_flat[None, :], (9, 1)) +
np.tile(cy_lbm[:, None], (1, n)) * np.tile(uy_flat[None, :], (9, 1)))
uu = 3/2 * (ux_flat**2 + uy_flat**2)
feq_flat = np.tile(w[:, None], (1, n)) * np.tile(rho_flat[None, :], (9, 1)) * (1 + cu + 0.5*cu**2 - np.tile(uu[None, :], (9, 1)))
feq_flat = np.nan_to_num(feq_flat)
feq = feq_flat.reshape(9, *shape)
return feq
f = equilibrium(np.ones((nx,ny)), np.ones((nx,ny))*0.001, np.zeros((nx,ny))) # Small initial u for equilibrium
# Cylinder mask
X, Y = np.meshgrid(np.arange(nx), np.arange(ny), indexing='ij')
obstacle = (X - cx)**2 + (Y - cy)**2 <= r**2
# Add trailing fin: horizontal line at y=cy, from x = cx + r to cx + r + fin_length
fin_start_x = cx + r
fin_end_x = cx + r + fin_length
fin = (Y == cy) & (X >= fin_start_x) & (X <= fin_end_x)
obstacle = obstacle | fin
def collide(f, rho, ux, uy):
feq = equilibrium(rho, ux, uy)
return f - (f - feq) / tau
def stream(f):
for i in range(1, 9):
f[i] = np.roll(f[i], shift=(cx_lbm[i], cy_lbm[i]), axis=(0, 1))
return f
def bounce_back(f, obstacle):
opp = [0, 3, 4, 1, 2, 7, 8, 5, 6] # Opposite directions
f_temp = f.copy()
for i in range(1, 9):
f[i, obstacle] = f_temp[opp[i], obstacle]
return f
def apply_inlet_outlet(f, rho, ux, uy, u_in_current):
# Inlet (left): Equilibrium BC for smoother
feq_left = equilibrium(1.0, u_in_current, 0.0)
f[:, 0, :] = feq_left.squeeze()[:, None]
# Outlet (right): copy
f[:, -1, :] = f[:, -2, :]
return f
def apply_sponge(f, rho, ux, uy):
# Sponge at outlet (last 20 columns): relax to equilibrium
sponge_start = nx - 20
for i in range(sponge_start, nx):
sigma = (i - sponge_start) / 20.0 # Linear damping
feq = equilibrium(rho[i, :], ux[i, :], uy[i, :])
f[:, i, :] = f[:, i, :] * (1 - sigma) + feq * sigma
return f
# Simulation loop
drag_save = []
t_save = []
for t in range(nt):
# Stream
f = stream(f)
# Boundaries
f = bounce_back(f, obstacle)
# Macroscopic variables
rho = np.sum(f, axis=0)
rho = np.clip(rho, 0.1, 10.0)
ux = np.sum(f * cx_lbm[:, None, None], axis=0) / rho
uy = np.sum(f * cy_lbm[:, None, None], axis=0) / rho
# Ramp inlet velocity (longer ramp)
u_in_current = u_in_max * min(1.0, t / 1000.0)
f = apply_inlet_outlet(f, rho, ux, uy, u_in_current)
f = apply_sponge(f, rho, ux, uy)
# Collide
f = collide(f, rho, ux, uy)
# Wait for the flow to develop before plotting
if plot_result:
if t > 1000:
if t % plot_every == 0 and t > 0:
vorticity = (np.roll(uy, -1, axis=0) - np.roll(uy, 1, axis=0)) / (2*dx) - \
(np.roll(ux, -1, axis=1) - np.roll(ux, 1, axis=1)) / (2*dx)
velocity_mag = np.sqrt(ux**2 + uy**2)
# Downstream region for metrics (x from fin_end_x to nx-50, full y)
downstream_start = int(fin_end_x) if 'fin_end_x' in locals() else nx//2
downstream = slice(downstream_start, nx-50)
vort_mag_down = np.mean(np.abs(vorticity[downstream, :]))
vel_var_down = np.var(ux[downstream, :] + uy[downstream, :]) # TKE proxy (variance of velocity components)
print(f"t={t}: Downstream Avg Vorticity Mag = {vort_mag_down:.4f}, TKE Proxy = {vel_var_down:.4f}")
# Cylinder drag (simple approximation: integrate x-momentum loss around cylinder)
cyl_slice = slice(cx - r - 5, cx + r + 5)
drag_approx = np.sum(rho[cyl_slice, :] * ux[cyl_slice, :] * dx) # Proxy for drag (momentum flux)
print(f"t={t}: Cylinder Drag Proxy = {drag_approx:.4f}")
fig, axs = plt.subplots(1, 2, figsize=(12, 4))
# Velocity magnitude
im0 = axs[0].imshow(velocity_mag.T, origin='lower', cmap='RdBu', vmin=0, vmax=u_in_max*1.5)
axs[0].set_title('Velocity Magnitude')
fig.colorbar(im0, ax=axs[0])
# Add black lines for cylinder and fin
circle = plt.Circle((cx, cy), r, color='black', fill=False, linewidth=2)
axs[0].add_patch(circle)
axs[0].hlines(cy, fin_start_x, fin_end_x, colors='black', linewidth=2)
# Vorticity
im1 = axs[1].imshow(vorticity.T, origin='lower', cmap='RdBu', vmin=-0.1, vmax=0.1)
axs[1].set_title('Vorticity')
fig.colorbar(im1, ax=axs[1])
# Add black lines for cylinder and fin
circle = plt.Circle((cx, cy), r, color='black', fill=False, linewidth=2)
axs[1].add_patch(circle)
axs[1].hlines(cy, fin_start_x, fin_end_x, colors='black', linewidth=2)
fig.suptitle(f't = {t}')
plt.show()
cyl_slice = slice(cx - r - 5, cx + r + 5)
drag_approx = np.sum(rho[cyl_slice, :] * ux[cyl_slice, :] * dx) # Proxy for drag (momentum flux)
drag_save.append(drag_approx)
t_save.append(t)
print(f"t={t}: Cylinder Drag Proxy = {drag_approx:.4f}")
return t, drag_approx
t, drag_approx = obj(50, nt=4000)
t=3999: Cylinder Drag Proxy = 386.2392